
В лаборатории Стэнфорда был создан первый мультимодальный робот, умеющий и летать, и ползать по стенам. Он способен подниматься после падений и взлетать по готовности, используя только сенсоры и вычисления, а также опыт всех роботов-предшественников.
Робот SCAMP похож на гигантское насекомое с двумя сервоприводами: один для движения по стене, другой, еще меньшего размера, для отталкивания от нее и навстречу ей. Вместе с углеродной рамой и цепкими лапками конструкция весит всего 11 грамм.
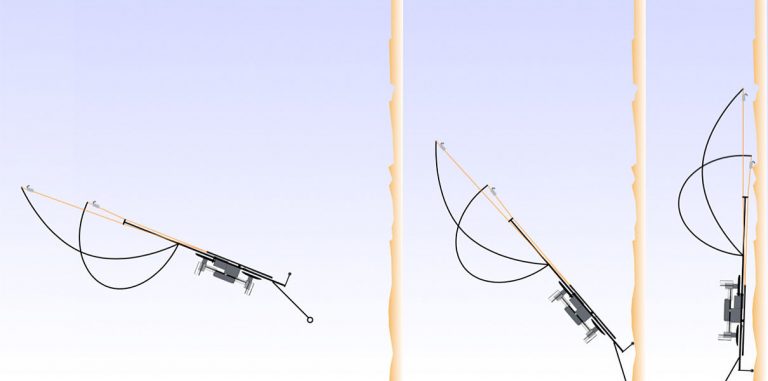
Моторы, предназначенные для полета, помогают также и во время лазанья. Как только робот чувствует, что теряет сцепление со стеной и начинает падать, включаются моторы и прижимают его обратно к вертикальной поверхности. Кроме того, незначительное воздействие роторов позволяет облегчить аппарату подъем наверх.
В будущем ученые планируют внести улучшения в «походку» робота, чтобы он меньше скользил. Меньшая длина хода может оказаться более надежной. Также инженеры намерены экспериментировать с разным типом поверхностей.
Кроме того, SCAMP пройдет машинное обучение, чтобы изучить алгоритмы, позволяющие динамически реагировать на ошибки и менять стратегию поведения. Правильно подобранные алгоритмы могут создавать новые типы движения, которые не приходили в голову самим изобретателям.