«Статья описывает первый опыт управления передвижением живого насекомого с помощью изменений походки, длины шага и скорости, которыми управляет пользователь», — сказано в публикации.
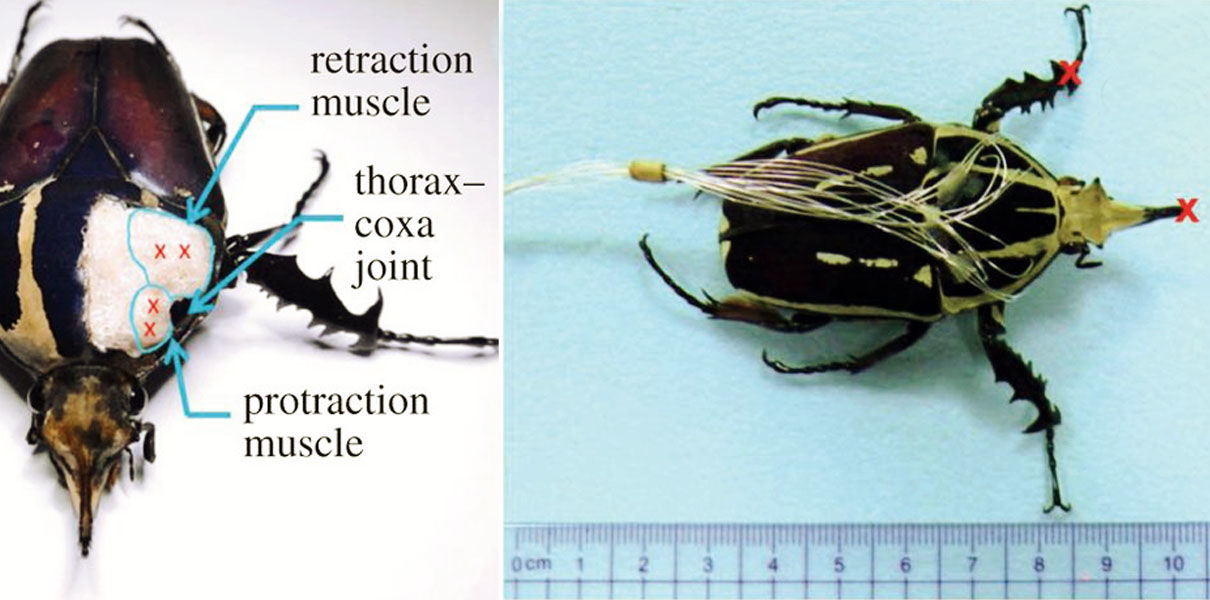
Подопытным был избран Mecynorhina torquata, крупный жук-бронзовик. Изучив строение его тела, ученые подключили к его мышцам контакты и стимулировали их сигналами широтно-импульсной модуляции от расположенного рядом (но не самом жуке) микроконтроллера.
Подобные гибриды имеют ряд преимуществ перед роботами схожего размера и строения. Это открывает широкие перспективы использования лапок насекомых вместо напечатанных на 3D-принтере или вживление имплантантов, работающих на энергии самих насекомых.
Сейчас исследователи изучают возможность оснащения тараканов маячками и микрофонами, управляющими их движением, чтобы посылать их на разведку в зоны бедствий и находить попавших под завалы людей по голосам.