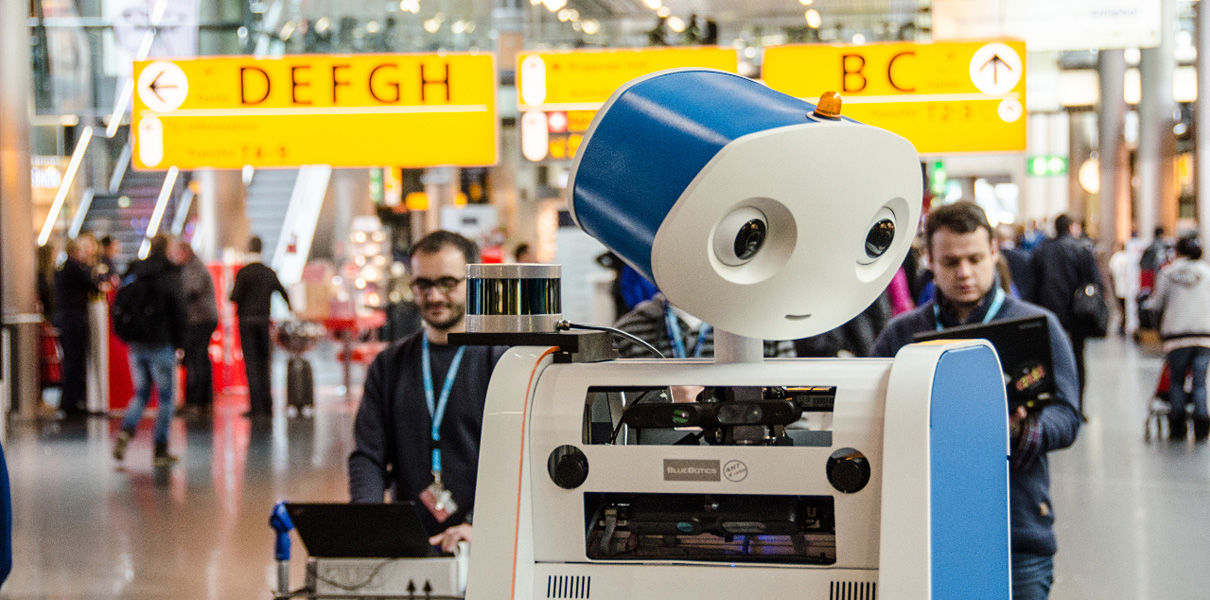
Spencer сканирует посадочные талоны пассажиров, собирает их в группу и ведет к нужным воротам. Робот приспосабливает свой шаг к скорости группы, обходит препятствия и информирует пассажиров о том, сколько времени им еще идти.
За социальное поведение робота отвечает профессор Ванесса Эверс. Spencer должен уметь опознавать группы людей, принимать во внимание поведение группы и уметь опознавать преграды, к примеру, грузовые тележки. Также он должен уметь предвосхищать возникновение новых обстоятельств.
«Когда речь идет о поведении Спенсера, мы имеем в виду скорость, с которой он движется, дистанцию между ним и группой и отношение к социальным ситуациям в аэропорту, — рассказаал кандидат технических наук Михаэль Йооссе. — К примеру, робот должен подождать, пока мимо пройдет большая толпа людей или проверять, следует ли за ним его группа».
