Для желудочных мини-операций будет использоваться робот-микрохирург, который раскладывается по принципу оригами. Он был разработан учеными из Массачусетского технологического института и представлен в прошлом году, но за это время его дизайн был усовершенствован.
Робот использует так называемую методику прерывистого скольжения — устройство зацепляется за поверхность во время движения и в то же время свободно скользит, чтобы изменить распределение своей массы. Прибор состоит из двух слоев структурного материала Biolefin, между которыми зажат материал, уменьшающийся при нагревании. Так как в желудке много жидкостей робот оборудован мини-плавником.

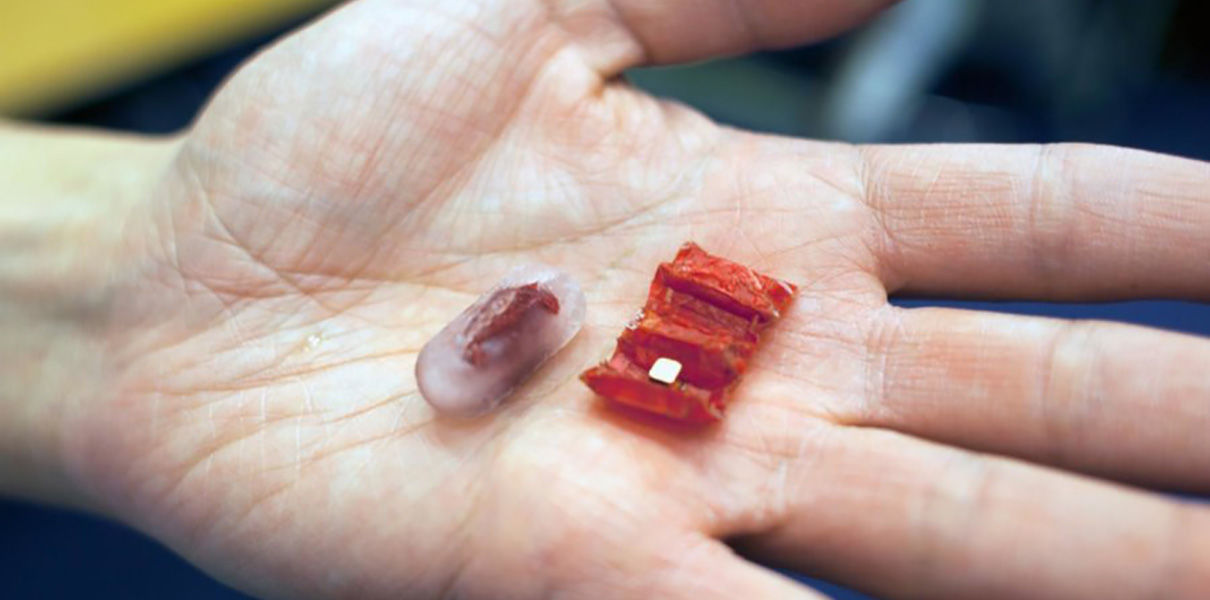
Механизм напоминает по структуре гармошку и в разложенном виде представляет собой небольшой прямоугольник. Робот вкладывается в капсулу с перевариваемой оболочкой и разворачивается только при попадании в желудок. Небольшой магнит в корпусе устройства позволяет управлять его движением.
Ученые использовали модель пищевода и желудка из силиконового каучука. Смесь воды и лимона воссоздавала кислотную среду. Все механические свойства робота в этой среде сохранились. В первую очередь устройство создано для того, чтобы извлекать мелкие проглоченные предметы, которые не всегда выводятся естественным путем и иногда прикрепляются к стенке желудка, приводя к появлению язвы.
Над проектом работали ученые из МТИ, Шеффилдского университета и Токийского технологического института. Результаты исследования будут представлены на Международной конференции по робототехнике и автоматизации, которая состоится на этой неделе.