
На крупнейшей конференции по робототехнике ICRA инженеры Мэрилендского университета представили доклад о об особенностях походки роботов весом менее 2 грамм с магнитными силовыми приводами. И, по мнению ученых, это только начало - подобные роботы будут становиться все меньше.
Для того чтобы выяснить, какая походка лучше всего подходит крошечным роботам с ногами, Райан Сен-Пьер сначала собирался использовать шестиногого робота RHex и просто уменьшить его. У такой конструкции каждая конечность имеет отдельное управление, что облегчает эксперимент с различными походками. Однако, оказалось, что в уменьшенном виде RHex работает не так хорошо, потому что ноги мешают друг другу, и Сен-Пьер снял среднюю пару.
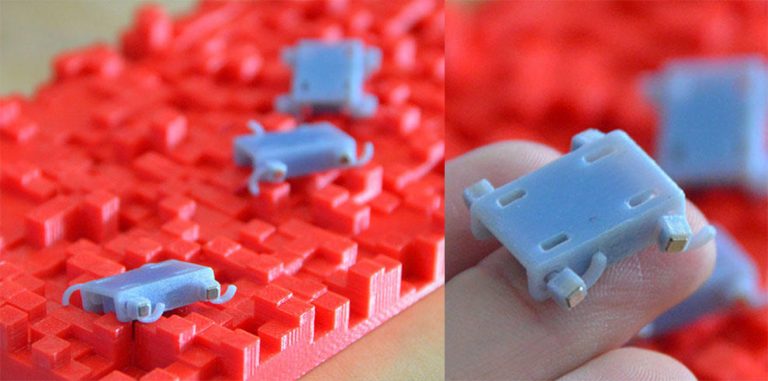
Учитывая размер (каждый робот длиной 20 мм, высота бедра 5,6 мм, вес около 1,6 г), стандартные моторы и аккумуляторы не подходили. Поэтому было использован магнитный привод в сочетании с внешним магнитным полем. В каждую из четырех ног роботов вставлен 2-мм магнит из неодимия, и когда рядом вращают большой магнит, магнитное поле заставляет его также шевелить ногами. Меняя ориентацию диполя магнитов в ногах, можно заставить робота двигаться другой походкой: рысью, вразвалку, скачками.
Двигаясь скачками, например, робот развивает скорость 78 мм/с, то есть преодолевает за секунду четыре длины своего тела. Это наилучший вариант движения по пересеченной местности, хотя для более тяжелых условий удобнее другие походки.
Преимущество этой конструкции в том, что можно легко заменить ноги, сменить тип походки, даже саму структуру робота. А при помощи 3D-принтера, работающего с несколькими материалами, можно запросто распечатать толпу таких роботов с разными конфигурациями, пишет IEEE Spectrum.