
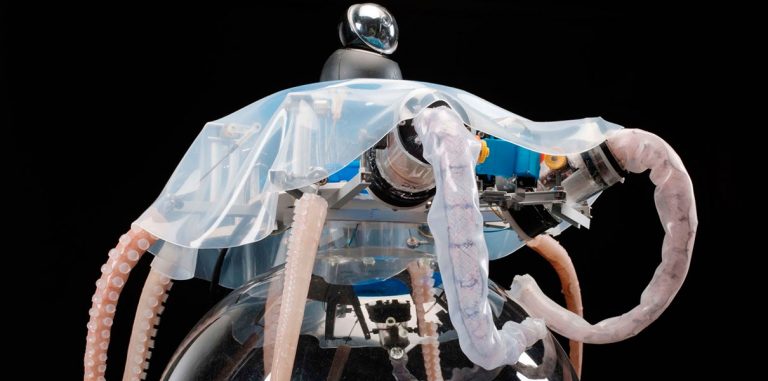
Ученые из Школы перспективных исследований Святой Анны в Пизе разработали робота-осьминога, который сможет изменить ход развития робототехники. Его главная особенность - это отсутствие неподвижных частей. Робот обладает максимальной подвижностью и может шагать, плыть и захватывать предметы.
Созданием робота-осьминога занималась профессор Сесилия Ласки, которая многие годы разрабатавает механизмы, вдохновленые природой, и стоит у истоков мягкой робототехники. По ее словам, недостатком современных роботизированных устройств остается их ригидность. В отличие от металлических андроидов в духе Boston Dynamics, робот-осьминог Ласки отличается гибкостью и плавно подстраивается под окружающую обстановку.
Робот может передвигаться по суше и в воде и захватывать предметы. При этом для его работы нужно меньше вычислительной мощности, чем для большинства подобных устройств. Основу системы составляют полимеры, активируемые при помощи электричества.
«Осьминог» прошел испытания в Средиземном море. В ходе эксперимента робот перевозил жидкость, которую мог выпускать по команде, а восемь мягких подвижных ноги позволяли ему легко перемещаться по песчаному дну.
Хотя разработки робота уже завершены, ученые приступили к следующему этапу исследований. Они ищут новые способы применения мягких роботов в сфере биомедицины. Биоинженеры уже создали мягкий эндоскоп, который может менять характеристики мягкости и твердости в зависимости от ситуации, а также представили искусственные голосовые связки, которые вибрируют при прохождении сквозь них потока воздуха. Также ученые разрабатывают роботизированную руку, которая поможет пожилым людям в быту, сообщает Digital Trends.

Soft Robotics создала манипулятор-осьминог
Идеи
По мнению руководительницы исследования Сесилии Ласки, мягкие роботы и роботизированные системы с деформируемой структурой — это будущее робототехники. С Ласки согласились бы многие современные ученые. Наиболее перспективными разработками сейчас занимаются исследователи из Гарварда, которые создали силовые приводы из мягкого пористого материала. С их помощью роботы могут передвигаться, имитируя сокращения мускулов человека, а при столкновении не причинять вред ни себе, ни окружающим.
В сингапурском научно-техническом агентстве A*STAR ученые использовали такую же технологию, что и итальянские коллеги, для создания полимерных мышц для мягких роботов.
изобрели способ превращения полимеров в искусственные мускулы, которые становятся эластичными под воздействием электричества. С помощью программы компьютерной симуляции инженерам будет проще создавать мягких роботов.