Сейчас большинство устройств способные ориентироваться в пространстве с помощью компьютерного зрения. Роботы получают информацию об окружающем пространстве с помощью камеры, а затем обрабатывают ее. Однако у простых роботов-манипуляторов нет камер, а траекторию их движения должен задавать оператор.
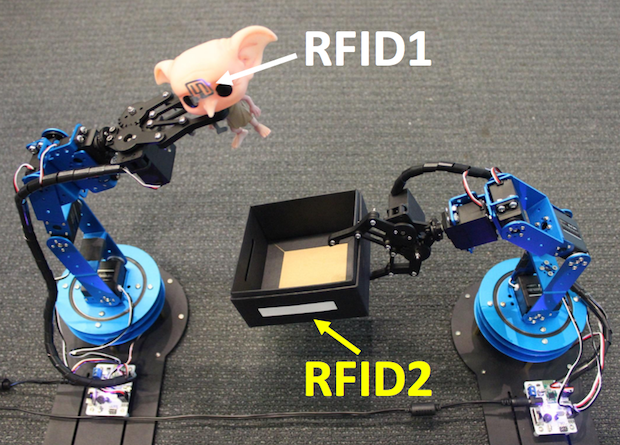
Исследователи из MIT создали систему, которая позволит роботам ориентироваться без помощи человека. TurboTrack состоит из приемника радиосигналов и антенны-помощника. Последняя отправляет сигнал, а приемник определяет нужные предметы на основе определения RFID-меток.
Передача сигнала занимает около 7,5 мс — это позволяет манипулятору быстро обнаружить местоположение нужного предмета и использовать его.
Ранее австралийские инженеры из центра полевой робототехники представили сельскохозяйственного робота SwagBot, который при помощи компьютерного зрения может самостоятельно увидеть на земле сорняки и опрыскать их гербицидами.