
Для сортировки мусора роботу требуются два навыка — способность захватывать предметы неправильной формы и в результате прикосновения понимать разницу между ними. Чаще всего вторую проблему инженеры решают с помощью компьютерного зрения, однако оно не всегда справляется со своей задачей, а мусор приходится сортировать заново.
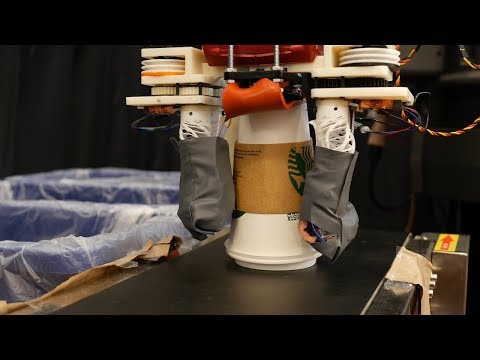
Исследователи из MIT отказались от идеи использования компьютерного зрения. Их робот представляет собой манипулятор, способный сдать предмет и таким образом определить материал, из которого он сделан. На каждом из пальцев робота установлены датчики, которые определяют степень сжатия и растяжения объектов.
Ранее инженеры из Массачусетского технологического университета (MIT) создали микроскопических роботов размером с молекулы, которые управляются светом. Устройства способны соединяться друг с другом, образуя любую форму, и толкать предметы.