
Инженеры из Японии и Великобритании создали из двух присосок и трех шлангов для душа робота, способного лазить по стенам и другим вертикальным поверхностям. Описание разработки опубликовано в журнале Soft Robotics.
Выполнение работ на вертикальных поверхностях — сложная задача для инженеров, которые занимаются разработкой роботов. Сейчас для устройств, способных выполнять монтажные и санитарные работы на стенах зданий, используются сложные и дорогие технологии адгезии или электроадгезии, которые делают таких роботов нерентабельными.
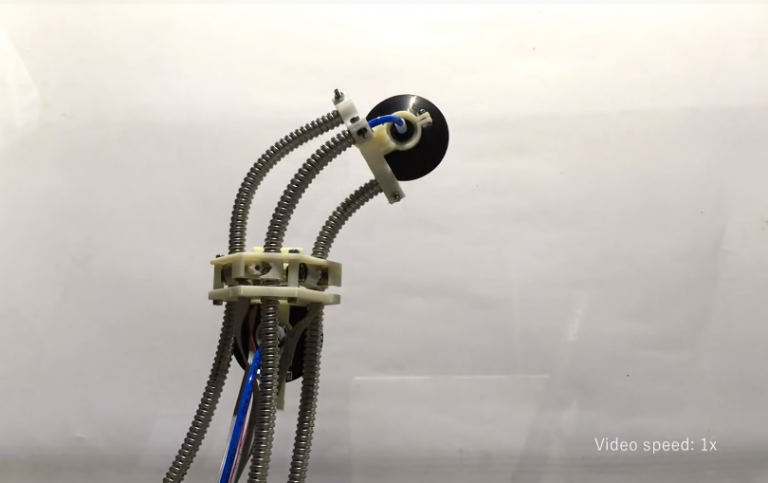
Исследователи из Кембриджского университета и Технологического университета Тойохаси создали робота, который состоит из трех водопроводных шлангов, двух вакуумных присосок, электродвигателей и насосов, который способен карабкаться по вертикальным поверхностям.
При движении по стене робот отпускает верхнюю присоску, вытягивается вверх, а затем опускает нижнюю. Устройство способно удерживать груз массой до 1,7 кг и подниматься на высоту до 4 м.
Ранее инженеры из Университета имени Бен-Гуриона создали робота из колесного устройства и квадрокоптера. Аппарат имеет корпус с изменяемой геометрией и четыре винта, которые позволяют ему взлетать для преодоления высоких препятствий.



