
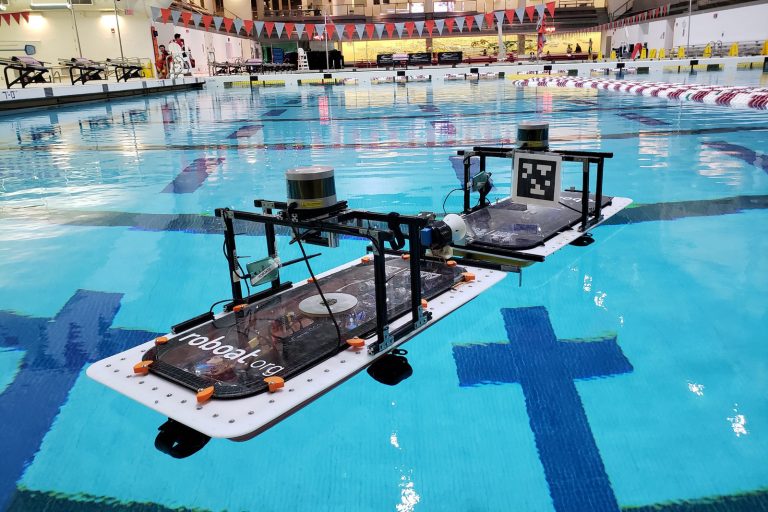
Исследователи из Массачусетского технологического института и Института AMS разработали автономных плавучих роботов, которые могут находить подобные устройства поблизости и образовывать с ними единую конструкцию — например, пешеходного моста, сборщика мусора или даже плавучую сцену для концерта. Об этом пишет Engadget.
Беспилотники из проекта Roboat используют камеры, лидарные алгоритмы и алгоритмы компьютерного зрения для поиска других роботов с QR-подобными метками, а затем занимают позицию для стыковки по команде. Если стыковка прошла неудачно, роботы пробуют провести операцию снова.
Сам механизм стыковки представляет собой систему типа «шарик-розетка», в которой используется лазер, чтобы определить, когда шарик находится внутри, фиксируя прибывающего робота.
Ранее Boston Dynamics показал, как его робособака играет с настоящей овчаркой.



