
Инженеры из Disney Research создали алгоритм, который позволяет роботам, изготовленным из проволоки, и анимированным персонажам совершать быстрые движения без остаточного колебания. Для этого система рассчитывает движение до его совершения и оптимизирует действия электромоторов так, чтобы погасить низкочастотные колебания, которые приводят к раскачиванию. Об этом говорится в статье, опубликованной в журнале ACM Transactions on Graphics.
Одна из главных проблем роботов по сравнению с их реальными прототипами — при движении у первых неизбежно возникает деформация, например, к сильным остаточным колебаниям при большом весе или размере.
Исследователи из Disney Research нашли решение этой проблемы. Это алгоритм, который оптимизирует движения анимированных персонажей из жестких и гибких элементов таким образом, чтобы погасить низкочастотные колебания. Они возникают в результате движения.
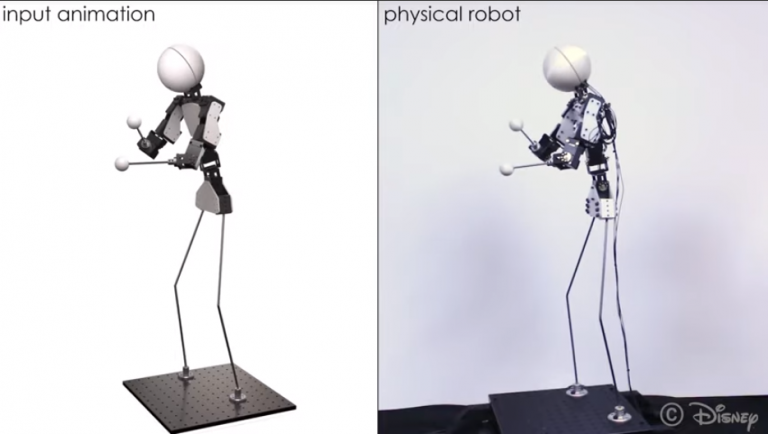
Разработку протестировали на четыре моделях, среди которых — антропоморфные роботы, боксирующие грушу или играющие на барабанах. Алгоритму удалось эффективно погасить остаточные колебания и сделать движения анимированных персонажей ближе к реальным человеческим.
Ранее инженеры из Швейцарской высшей технической школы Цюриха (ETH Zurich) создали сенсорную перчатку, способную захватывать движения рук с гораздо большей детализацией и нюансами, чем большинство существующих решений. Она позволит точно захватывать реальные физические движения и воспроизводить их в цифровых симуляциях.



