На сегодняшний день инженерам не удается создать робота, который может совершать точные и быстрые движения одновременно. Некоторые устройства могут совершать такие движения, однако в их работе используются жесткие сцепляющие элементы. В результате при превышении силы захватываемый предмет может просто повредиться.
Группе инженеров под руководством Масатоси Исикавы из Токийского университета удалось создать роборуку, которая может отслеживать движения, реагировать на прикосновения к предметам, а также быстро брать необходимые объекты.
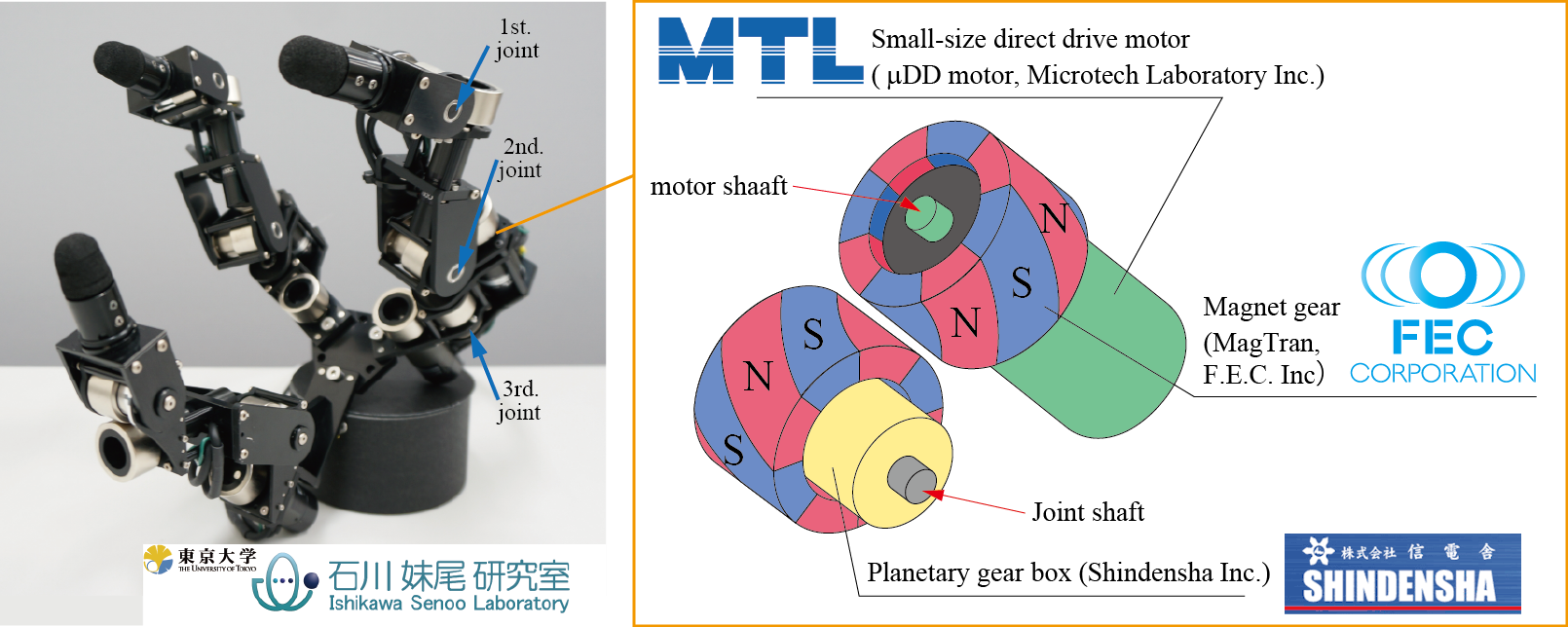
Рука состоит из четырех пальцев, в каждый из которых встроены четыре сегмента, соединенные между собой магнитной передачей. Благодаря специальным намагниченным областям, расположенным под углом к плоскости кольца, механизм передает крутящий момент под углом 90°. Такая конструкция позволяет устройству снизить трение между элементами.

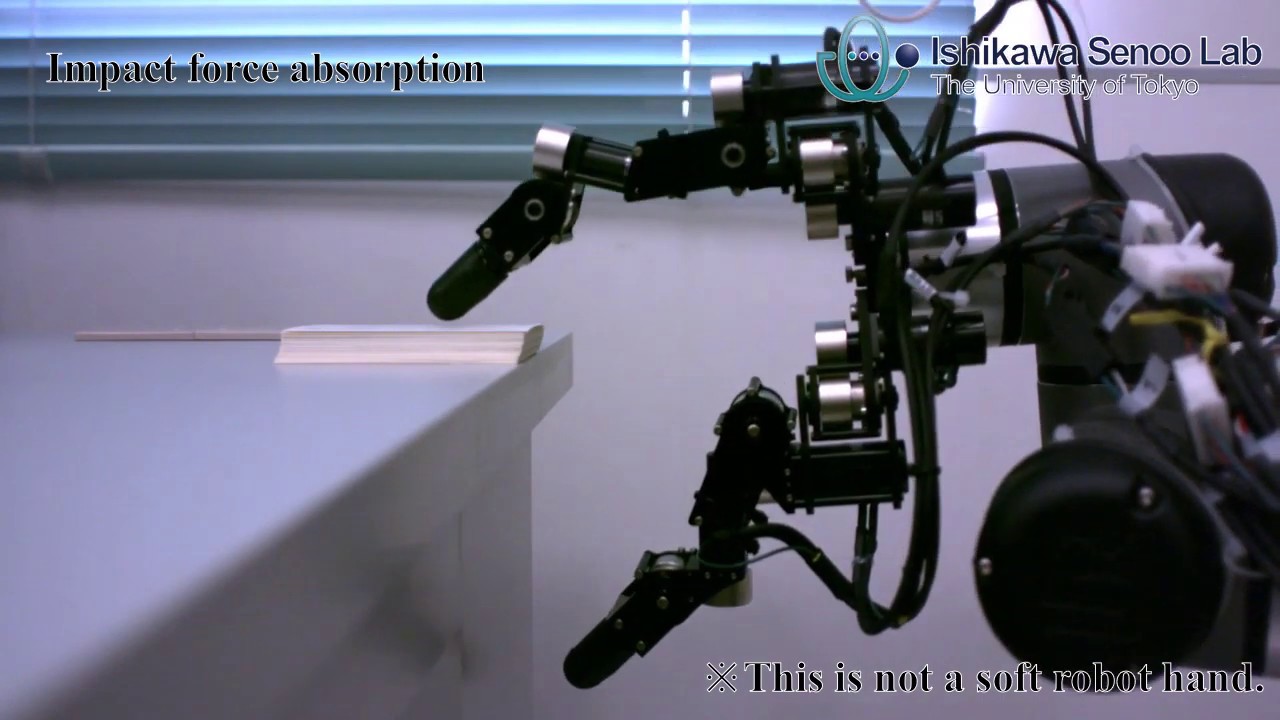
В ходе эксперимента инженеры реализовали захват предметов со стола, используя только механическую систему отслеживания. Кроме того, в эксперименте с колодой карт робот сможет снять одну карту, захватив ее двумя пальцами.