
Innopolis Simulator для автономных подвижных объектов, разработанный на основе Unity 3D, может использоваться разработчиками и конечными пользователями в целях тестирования, отладки и образовательной деятельности. Презентация разработки российского ИТ-вуза пройдёт 15 октября.
Научные сотрудники Центра технологий компонентов робототехники и мехатроники Университета Иннополис создали программный комплекс для отладки и моделирования поведения полноценной модели в симуляторе. С помощью него разработчики беспилотных средств смогут избежать критических ошибок проектирования, исправить их на ранних этапах, проводить больше испытаний прототипа и сэкономить на натурных испытаниях. «Сейчас для тестов реальной машины требуется 2—3 человека, которым приходится делать много проездов на реальной площадке. Симулятор позволяет всё это сделать без выхода на улицу с участием одного человека», — объясняет инженер-исследователь Лаборатории автономных транспортных средств Сергей Копылов.
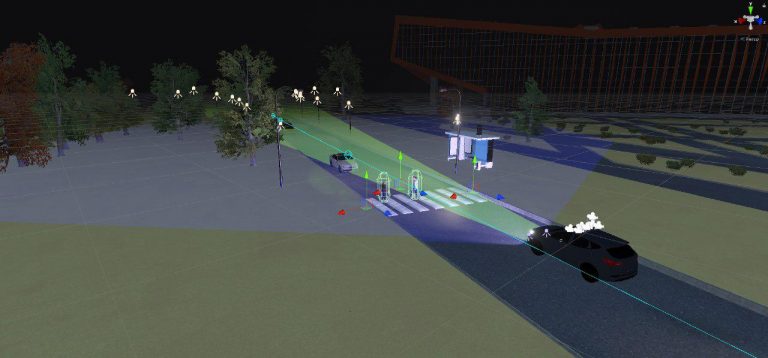
Innopolis Simulator отрабатывает различные сценарии на дороге, имитирует движение трафика и пешеходов и их обнаружение, моделирует все необходимые датчики и сенсоры — радар, лидар, камеры, GPS, IMU. В программном комплексе реализованы модули ground truth, которые определяют точное расположение объектов в пространстве.
«Также мы разработали систему визуализации активных камер, благодаря чему изображения в систему беспилотника поступают в режиме реального времени. Создали модули картографирования и динамической загрузки карт, текстурирование поверхности которых тоже происходит в реальном времени, ландшафта и некоторых объектов окружения в зависимости от положения автомобиля в глобальных координатах. Мы создали возможность конвертации координат из разных систем и создания дорожного полотна. Интегрировали модуль для создания и экспорта HD карт».
Инженер-исследователь Лаборатории автономных транспортных средств Сергей Копылов.
По сравнению с аналогами, у симулятора Университета Иннополис есть 10 уникальных параметров: гибкое конфигурирование каждого датчика, снятие датасетов, разработка уникальных сценариев, поддержка разнообразных моделей подвижных объектов, модуль картографирования, геокодинга и процедурного генерирования поверхности и объектов в зависимости от положения автомобиля, модуль создания и экспорта HD карт, модуль управления временем суток и погодными эффектами, модуль аналитики, модуль редактирования контента сцены на время выполнения.
«Разработка виртуальной среды для моделирования движения роботизированного городского автомобиля сократит стоимость его процесса разработки, особенно в области настройки и тестирования сенсорного и управляющего оборудования. Уже во время разработки специалистам будет понятно, что из оборудования необходимо, а от чего можно отказаться. С помощью нашего симулятора повысится уровень безопасности автомобиля во время движения в реальной городской среде», — добавил руководитель Центра технологий компонентов робототехники и мехатроники Александр Климчик.



