Инженеры из Калифорнийского университета в Сан-Диего разработали доступную и простую в использовании систему для отслеживания расположения гибких хирургических роботов внутри человеческого тела. Исследование ученых опубликовано на сайте журнала IEEE Robotics and Automation Letters.
Исследователи встроили магнит в наконечник гибкого робота, который можно использовать в внутри человеческого тела, например, в артериальных каналах мозга. Система работает аналогично уже существующим инструментам, которые позволяют отслеживать вживленные чипы в человеческом теле, однако у нее нет негативного влияния на организм.
«Мы работали с роботом, который представляет собой устройство из очень тонкого нейлона, который мы инвертируем и создаем давление с помощью жидкости, которая заставляет робота расти».
Ученые из Калифорнийского университета.
Поскольку робот мягкий и движется в процессе роста, он практически не влияет на окружающую среду, что делает его идеальным для использования в медицинских целях.
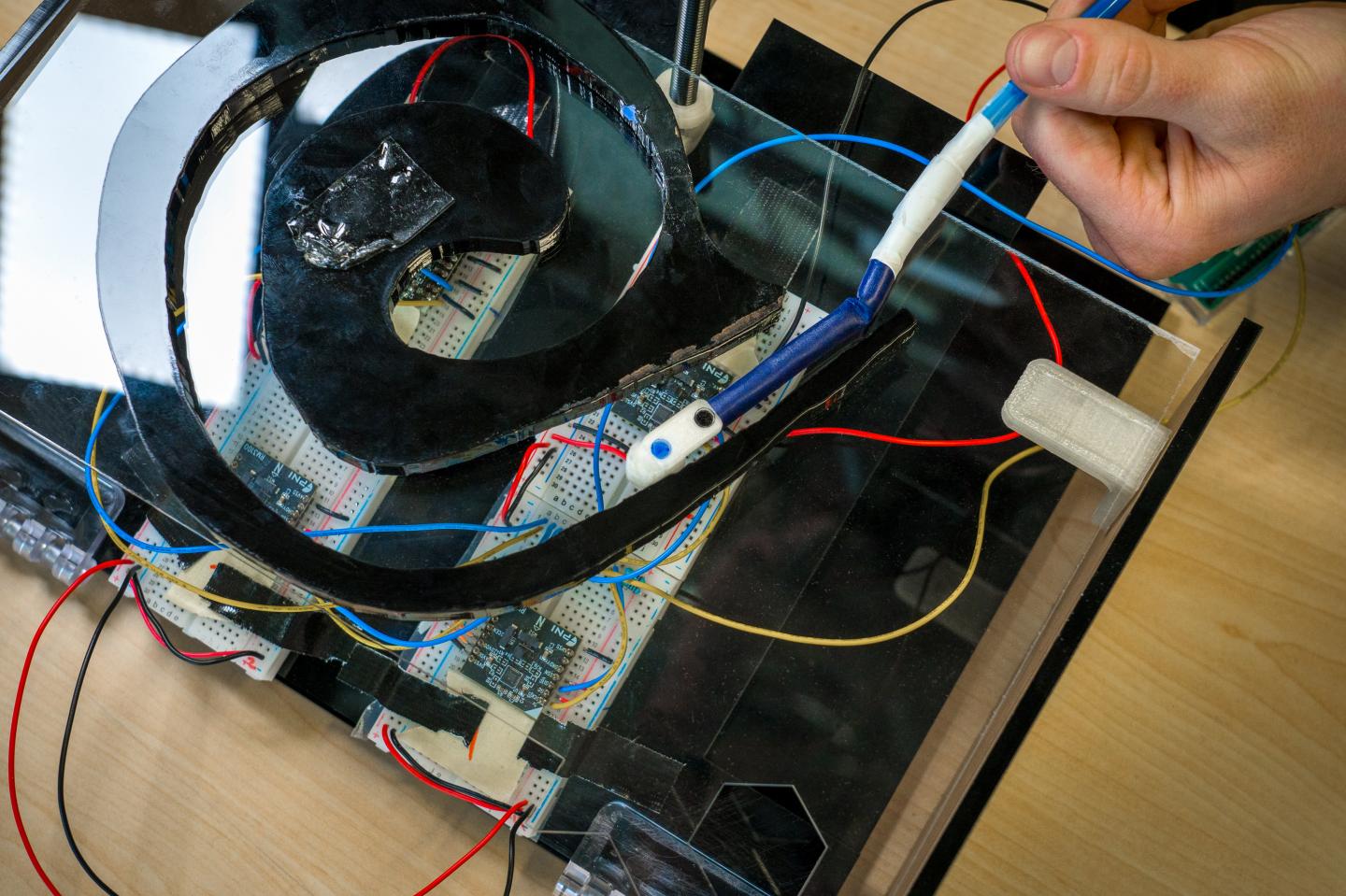
Затем исследователи использовали существующие методы локализации магнитов, которые очень похожи на работу GPS, чтобы разработать компьютерную модель, которая предсказывает местоположение робота. Система состоит из четырех датчиков, которые равноудаленно расположены вокруг области, в которой работает робот, для измерения напряженности магнитного поля. На основании того, насколько сильное поле, они могут определить, где находится наконечник робота. Полученные данные обрабатывает нейросеть, устанавливая точное местоположение устройства.
Ученые отмечают, что вся система, включая установку робота, магниты и локализацию магнита, стоит около $100.



