В MIT создали систему осязания для мягких роботов: они могут собирать даже чипсы. Это стало возможным с помощью новых латексных «пузырей» и систем проприоцепции. О результатах разработок можно прочитать на сайте вуза.
Главная проблема в создании мягких роботов состоит в том, что они должны понимать, что именно они захватывают и сколько сил должны для этого использовать. Одна из команд разработчиков решила эту проблему, основываясь на предыдущих исследованиях Массачусетского технологического института и Гарвардского университета, в которых исследователи разработали мягкий, конусообразный роботизированный захват, который сжимается даже на таких объектах, как Венерина мухоловка, и может поднимать предметы в 100 раз больше своего веса. Разработчики усовершенствовали этот «волшебный шариковый захват», добавив датчики, которые позволяют ему подбирать предметы, настолько тонкие, как картофельные чипсы, и классифицировать их, чтобы захватчик мог их распознавать в будущем.
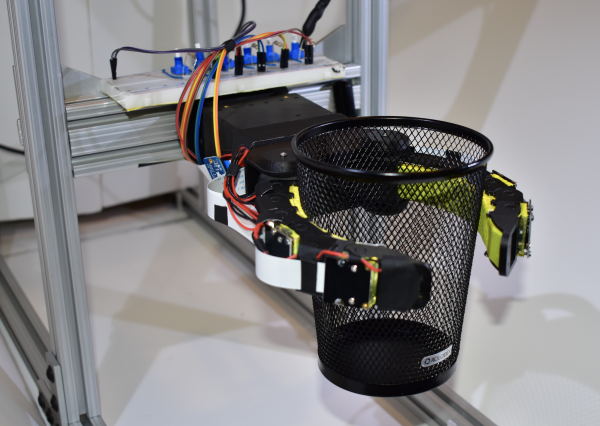
Команда также добавила тактильные датчики, изготовленные из латексных «пузырей», подключенных к датчикам давления. Алгоритм использует обратную связь, чтобы позволить захватчику определить, какое усилие использовать. Пока что команда проверила датчики-захваты на предметах: начиная от тяжелых бутылок и заканчивая банками, яблоками, зубной щеткой и мешком печенья.
«Мы надеемся, что эти роботы позволят использовать новый метод мягкого зондирования, который можно применить к широкому спектру различных действий в производственных условиях: от упаковки до подъема», — рассказала Джози Хьюз, ведущий автор новой статьи о работе.
Вторая группа исследователей из Массачусетского технологического института создала мягкий роботизированный палец под названием GelFlex, который использует встроенные камеры и глубокое обучение для создания тактильных ощущений и проприоцепции. Захват похож на то, как человек держит чашку двумя пальцами. Каждый палец имеет одну камеру рядом с кончиком пальца, а другую — посередине. Камеры наблюдают за состоянием передней и боковой поверхности пальца, а нейронная сеть использует информацию с камер для обратной связи. Это позволяет захватчику подбирать предметы различной формы.
«Наш мягкий палец может обеспечить высокую точность проприоцепции, точно идентифицировать захваченные объекты, а также выдерживать значительное воздействие, не нанося вреда взаимодействующей среде и самому себе», — рассказал один из авторов разработки.
Читайте также:
— Самый распространенный в океане организм выращивает вирус в своем ДНК
— В библейском святилище нашли каннабис. Археологи гадают, для чего он был нужен



