
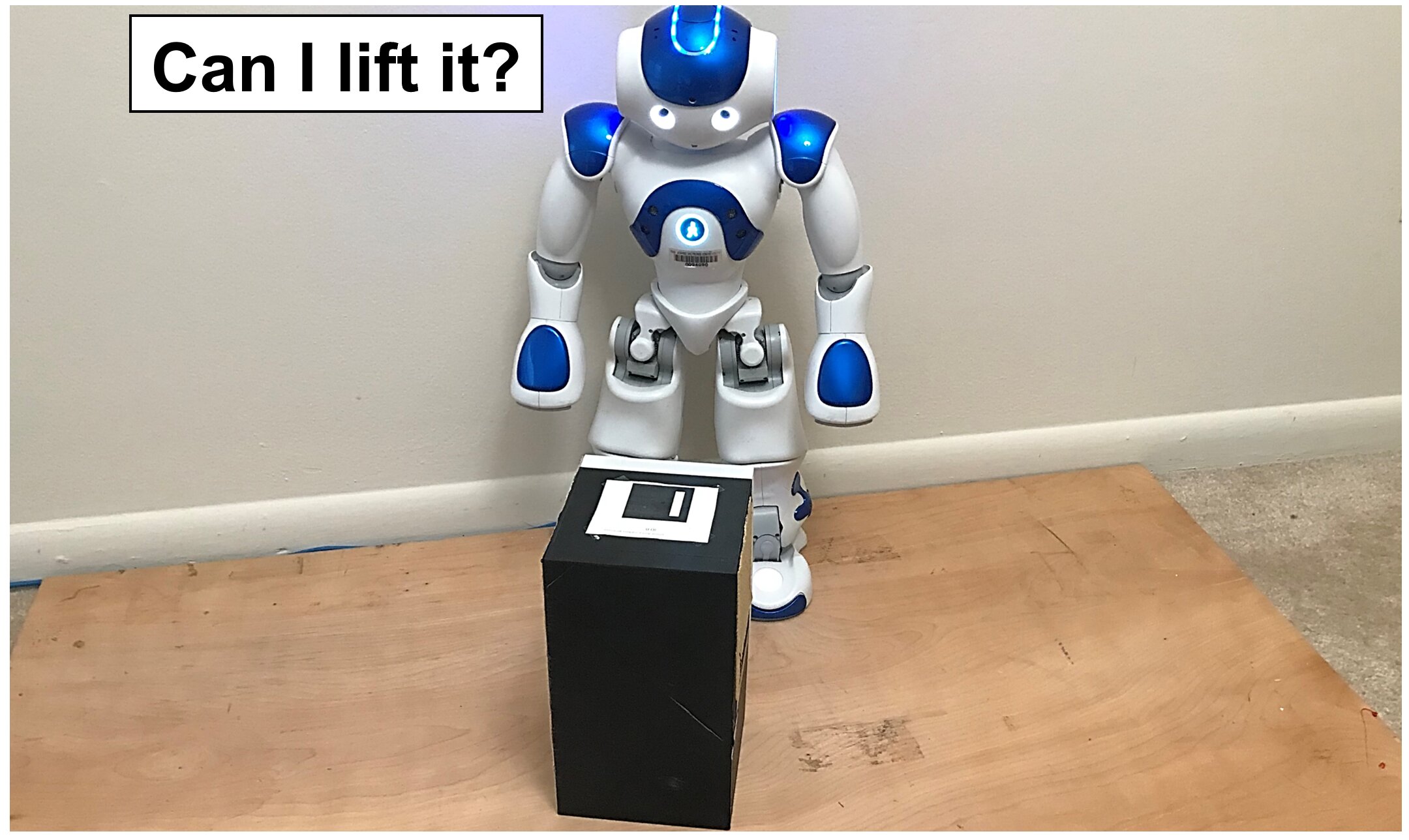
Гуманоидные роботы с телами, напоминающими человеческие, вскоре могут помочь людям выполнять широкий спектр задач. Для многих роботов такие задачи включают сбор предметов разной формы, веса и размера. В то время как многие современные роботы-гуманоиды способны поднимать маленькие и легкие предметы, подъем громоздких или тяжелых предметов часто оказывается более сложной задачей. Фактически если объект слишком большой или тяжелый, робот может сломать или уронить его. Чтобы решить эту проблему, исследователи из Университета Джона Хопкинса и Национального университета Сингапура (NUS) разработали метод, который позволяет роботам определять, смогут ли они поднять тяжелый ящик с неизвестными физическими свойствами, сообщает TechXplore.
«Нас особенно интересовало, как робот-гуманоид может рассуждать о возможности поднять ящик с неизвестными физическими параметрами, — рассказал TechXplore Юаньфэн Хан, один из исследователей, проводивших исследование. — Для выполнения такой сложной задачи обычно роботу необходимо сначала определить физические параметры коробки, а затем создать безопасную и стабильную траекторию движения всего тела, чтобы поднять коробку».
Процесс, посредством которого робот генерирует траектории движения, позволяющие ему поднимать объекты, может потребовать вычислительных ресурсов. Фактически роботы-гуманоиды обычно обладают большей свободой, и все же движение, которое требуется их телу для подъема объекта, должно соответствовать нескольким ограничениям. Это означает, что если ящик слишком тяжелый или его центр масс находится слишком далеко от робота, он, скорее всего, не сможет завершить это движение.
«Подумайте о нас, людях, когда мы пытаемся понять, можем ли поднять тяжелый предмет, например, гантель, — объяснил Хан. — Сначала мы взаимодействуем с гантелью, чтобы получить определенное ощущение объекта. Затем, основываясь на нашем предыдущем опыте, мы как бы знаем, слишком ли он тяжел для нас, чтобы поднять, или нет. Точно так же наш метод начинается с построения таблицы траектории, которая сохраняет различные допустимые подъемные движения для робота, соответствующие диапазону физических параметров коробки с использованием моделирования. Затем робот рассматривает эту таблицу как информацию из своего предыдущего опыта».
Методика, разработанная Ханом в сотрудничестве со своим коллегой Руйсин Ли и его руководителем Грегори С. Чирикджяном (профессором и заведующим кафедрой машиностроения в NUS), позволяет роботу получить представление об инерционных параметрах коробки после краткого взаимодействия. Затем робот снова просматривает таблицу траекторий, созданную этим методом, и проверяет, включает ли она подъемное движение, которое позволило бы ему поднять ящик с этими расчетными параметрами.
Если такое движение или траектория существует, то подъем ящика считается возможным, и робот может немедленно выполнить задачу. Если его нет, то робот считает задачу выходящей за рамки своих возможностей.
«Наш метод может значительно повысить эффективность работы при выполнении практических задач подбора и размещения, особенно если они повторяются, — заключает Хан. — В нашей будущей работе мы планируем применить подход к различным объектам или грузоподъемным задачам».
Читать также
Посмотрите на 3D-карту Вселенной: ее составляли 20 лет и она уже удивила ученых
Ученые выяснили, почему дети являются самыми опасными переносчиками COVID-19
Выяснилось, что заставило цивилизацию майя покинуть свои города



