

Мягкие роботы привлекают большое внимание в исследовательских кругах в основном из-за своей безопасности для людей, которым, возможно, придется работать в непосредственной близости от этих машин. Рассказываем, чем мягкие роботы отличаются от обычных, как они работают и чем могут помочь человечеству.
Что такое мягкие роботы?
Мягкая робототехника — это особая область робототехники, которая занимается конструированием роботов из материалов с высокой степенью совместимости, подобных тем, которые встречаются в живых организмах.
Мягкая робототехника во многом зависит от того, как живые организмы перемещаются и адаптируются к своему окружению. В отличие от роботов, построенных из жестких материалов, мягкие роботы обеспечивают повышенную гибкость и адаптируемость для выполнения задач, а также повышенную безопасность при работе с людьми. Эти характеристики позволяют использовать его в медицине и производстве.
Мягкая робототехника в основном конструирует роботов полностью из мягких материалов. В итоге получающиеся роботы похожи на таких беспозвоночных, как черви или осьминоги. Моделирование движения таких роботов — сложная задача. Дело в том, что для таких процессов необходимо применять методы механики сплошной среды. Именно поэтому мягкие роботы иногда называют роботами сплошной среды (continuum robots).
Напомним, механика сплошных сред — раздел механики, физики сплошных сред и физики конденсированного состояния, посвященный движению газообразных, жидких и деформируемых твердых тел, а также силовым взаимодействиям в таких телах.
Гибриды мягких и жестких роботов
Для изучения биологических явлений ученые создают мягких роботов по образу живых организмов и проводят эксперименты, которые сложно выполнять на настоящих организмах.
Тем не менее, существуют жесткие роботы, которые также способны к непрерывным деформациям, например, робот-змея.
Мягкие конструкции могут использоваться как часть более крупного жесткого робота. Мягкие эффекторы роботов для захвата и манипулирования объектами обеспечивают преимущество. Дело в том, что они не разрушают хрупкие объекты.
Также возможно создание гибридных мягко-жестких роботов, у которых имеется внутренний жесткий каркас и внешние мягкие элементы. Мягкие элементы могут иметь много функций: как воздействующие механизмы аналогичные мышцам животных, так и смягчающий материал для обеспечения безопасности при столкновении с человеком.
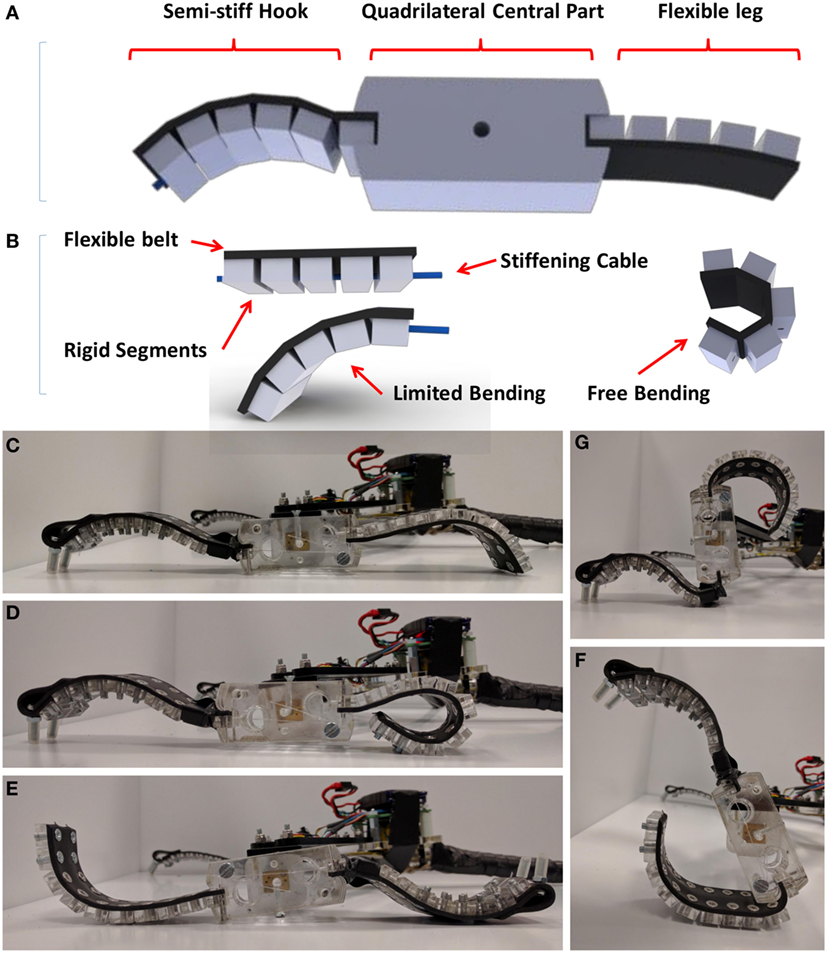
Фото: Али Садеги, Алессио Мондини, Эмануэла Дель Дотторе, Ананд Кумар Мишра и Барбара Маццолай
Мягких роботов можно сгибать, придавать любую форму. Они сделаны из очень мягкого материала, в том числе из наноматериалов. Это делает их больше похожими на человеческие части тела, например, на мышцы. На самом деле можно сказать, что эти роботы почти оживают с помощью наноматериалов.
Несмотря на множество исследований в области мягких роботов, инженеры пока в самом начале пути. Однако эксперты прогнозируют, что уже к 2024 году их рынок достигнет $2,16 млрд.
Чем мягкие роботы отличаются от обычных?
Металлические роботы гораздо более ограничены. Они были сконструированы с учетом скорости и точности, что делало их идеальными для таких вещей, как работа на конвейере. Но они не так уж универсальны.
Мягкие роботы отличаются от промышленных или коллаборативных роботов тем, что их конструкция сделана из мягких, податливых материалов. Их конструкция сильно отличается от любой другой формы роботов, и аналогично мягкие роботы выполняют очень разные функции.
По большей части мягкие роботы все еще находятся на ранних стадиях разработки, и самый первый мягкий робот был разработан в 2011 году профессором Гарварда Джорджем Уайтсайдсом. С тех пор количество и типы мягких роботов резко возросли. Хотя до их реальной коммерческой жизнеспособности может быть несколько лет, они по-прежнему представляют собой захватывающую технологию с большим потенциалом.
Мягкие роботы — захватывающая инновация в мире робототехники. Вышеупомянутые пять типов мягких роботов могут иметь наибольший коммерческий потенциал из всех типов мягких роботов, которые в настоящее время разрабатываются.
В отличие от промышленных или коллаборативных роботов, мягкие роботы обслуживают широкий спектр приложений.
Как применяются мягкие роботы?
Привлекательность мягких роботов заключается в их гибкости и универсальности.
6 многообещающих типов мягких роботов
Существует много различных типов мягких роботов, но есть 6 различных приложений, которые обещают наибольший коммерческий потенциал.
- Роботизированные мышцы: сейчас разрабатываются несколько типов мягких роботов, которые будут работать в качестве роботизированных мышц. Один из самых многообещающих прототипов черпает вдохновение из оригами. Его сложенная конструкция может поднимать вес в 1 000 раз больше собственного веса и масштабируется от нескольких миллиметров до метра в длину. Кроме того, сейчас ученые работают над созданием наноразмерных роботов из ДНК.
- Альпинистские роботы: у этих типов роботов есть много потенциальные применений, начиная от осмотра и обслуживания зданий и заканчивая поисково-спасательными операциями. Одна из версий роботов для мягкого лазания имеет изогнутую конструкцию, очень похожую на гусеницу. Это позволяет ему ползать вверх и вниз по сооружениям разного размера.
- Съедобные роботы. Первый проект таких роботов создан школьной командой в Филадельфии для ежегодного конкурса Soft Robotics. Эти биоразлагаемые роботы могут безопасно доставлять лекарства к различным частям тела.
- Носимые роботы. Эти биомиметические устройства могут помочь пациенту, проходящему физическую реабилитацию. Мягкий робот имитирует естественные движения тела, где бы он ни находился, помогая пациенту восстановить нормальные двигательные функции.
- Роботы-протезы. Мягкие роботы могут использоваться для создания превосходных протезов для людей, у которых отсутствуют конечности или части тела. Часто технология мягкой робототехники используется на конце протеза руки для более деликатного и точного захвата объектов.
- Роботы-космонавты. Ученые НАСА предполагают, что однажды они будут летать по поверхности Марса. Другие уже проектируют роботов, которые будут работать в самых труднодоступных частях человеческого тела.
Хотя мягкие роботы также могут использоваться в промышленных условиях — особенно в качестве коллаборативных роботов (также известных как «коботы»), работающих вместе с людьми, они вряд ли ограничиваются этим.
Первый в мире мягкий автономный робот
В 2016 году ученые из Гарварда использовали жидкую силиконовую резину для разработки Octobot — первого в мире мягкого автономного робота. Вдохновленные осьминогами, эти мягкие роботы могут крутиться и преодолевать препятствия, которые могут оказаться невозможными для резких, жестких металлических роботов, подобных тем, что изображены в «Терминаторе» или «Звездных войнах».
Удивительно, но Octobot дешевле в изготовлении, чем латте, а заправка его топливом стоит всего 5 центов. Можно представить сотни дешевых мягких роботов, которых отправляют исследовать место происшествия, преодолевать препятствия и узкие места, чтобы помочь в спасательной операции.
«Основная цель мягкой робототехники —не создавать сверхточные машины, потому что они у нас уже есть, — сказала биомедицинский инженер Джада Гербони в своем выступлении на TED в 2018 году. — А сделать роботов способными противостоять неожиданным ситуациям в реальном мире».
Мягкие роботы в медицине
Мягкие роботы могут использоваться в качестве хирургических и медицинских инструментов (в частности эндоскопов). Их преимущество в том, что они перемещаются по структурам тела более легко, чем это могут делать традиционные инструменты. Это дает врачам более четкое представление о той области тела пациента, которую они хотят исследовать.
Полностью мягкая роботизированная одежда, которая может помочь людям передвигаться, стала на шаг ближе к реальности благодаря разработке новой гибкой и легкой системы питания для мягкой робототехники.
Открытие, сделанное группой из Бристольского университета, может проложить путь к носимым вспомогательным устройствам для людей с ограниченными возможностями и людей, страдающих возрастной дегенерацией мышц. Исследование опубликовано сегодня в Science Robotics.

Мягкие роботы сделаны из податливых материалов, которые могут растягиваться и скручиваться. Из этих материалов можно сделать искусственные мышцы, которые сокращаются, когда в них нагнетается воздух. Мягкость этих мышц позволяет использовать вспомогательную одежду. Однако до сих пор эти пневматические искусственные мышцы приводились в действие обычными электромагнитными (приводными от двигателя) насосами, которые являются громоздкими, шумными, сложными и дорогими.
Исследователи из Бристольской лаборатории SoftLab и Бристольской лаборатории робототехники под руководством профессора робототехники Джонатана Росситера успешно продемонстрировали новый электропневматический насос, который является мягким, гибким, недорогим и простым в изготовлении.
В статье команда описывает, как новый мягкий насос размером с кредитную карту может приводить в действие искусственные мышцы с пневматическим пузырем и перекачивать жидкости. Команда также обрисовывает в общих чертах свои следующие шаги, чтобы сделать мощную одежду реальностью.
Точно так же полимеры титана на основе углерода можно использовать в сочетании с синтетическими полимерами для создания ультратонких искусственных мышц. Эта технология была продемонстрирована в художественных репродукциях танцующих бабочек, трепещущих листьев и цветущих цветов в Корейском передовом институте науки и технологий.
Как работают мягкие роботы?
Мягкие роботы, особенно разработанные для имитации жизни, часто должны испытывать циклическую нагрузку при перемещении или выполнении любых других задач. Например, в случае робота, похожего на миногу или каракатицу, описанного выше, для движения потребуется электролиз воды и воспламенение газа, что приведет к быстрому расширению для продвижения робота вперед. Это повторяющееся и взрывное расширение и сжатие создаст интенсивную циклическую нагрузку на выбранный полимерный материал. Робота под водой на Европе было бы практически невозможно починить или заменить, поэтому необходимо позаботиться о выборе материала и конструкции, которые сводят к минимуму возникновение и распространение усталостных трещин. В частности следует выбирать материал с пределом выносливости или частотой амплитуды напряжений, выше которой усталостная характеристика полимера больше не зависит от частоты.
Поскольку мягкие роботы изготовлены из мягких материалов, необходимо учитывать температурные эффекты. Предел текучести материала имеет тенденцию к снижению с температурой, а в полимерных материалах этот эффект еще более ощутим. При комнатной и более высоких температурах длинные цепи во многих полимерах могут растягиваться и скользить вдоль друг друга, предотвращая локальную концентрацию напряжений в одной области и делая материал пластичным. Но большинство полимеров претерпевают температуру перехода из пластичного в хрупкое состояние ниже которой не хватает тепловой энергии для того, чтобы длинные цепи реагировали таким пластичным образом, и разрушение гораздо более вероятно. Считается, что тенденция к тому, что полимерные материалы становятся хрупкими при более низких температурах, является причиной катастрофы шаттла «Челленджер», и к ней следует относиться очень серьезно, особенно для мягких роботов, которые будут внедрятся в медицине. Температура перехода из вязкого состояния в хрупкое не обязательно должна быть такой, которую можно считать «холодной», и фактически является характеристикой самого материала в зависимости от его кристалличности, ударной вязкости, размера боковой группы (в случае полимеров) и других факторов.
Недостатки технологии
Мягкие роботы не лишены недостатков. В частности ученые обнаружили, что приводы жидкости — устройства, которые фактически оживляют роботов — медленно включаются из-за огромного количества жидкости, необходимой для движения, или из-за того, что их поток замедляется различными структурами внутри устройство (например, трубки и клапаны).
Однако исследователи из Гарварда разрабатывают обходной путь. Отмечая, что изгибание таких игрушек приводит к высвобождению большого количества энергии, они конструируют приводы с двумя выдвижными крышками, одна внутри другой. Когда внешняя крышка надувается, давление увеличивается на внутреннюю. Когда она изгибается, высвобождение энергии приводит в движение устройство.
У мягких роботов есть потенциал, который простирается до Марса и обратно, и они, несомненно, станут большей частью общества в ближайшие годы. Их возможности ограничены только человеческим воображением.
Мягкие роботы и люди
Роботы с мягким телом предлагают возможность для социального и тактильного взаимодействия между человеком и роботом, которые требуют тщательного рассмотрения возможности неуместных эмоциональных привязанностей, а также личного и социально разрушительного поведения пользователей. Этические проблемы, связанные с взаимодействием человека и робота, и то, как они должны способствовать проектированию мягкой робототехники в контексте социального взаимодействия, обсуждаются в статье для журнала Soft Robotics.
Томас Арнольд и Маттиас Шойц, Университет Тафтса, Медфорд, Массачусетс, являются соавторами статьи, озаглавленной «Тактильная этика мягкой робототехники: разумное проектирование для взаимодействия человека и робота». Они исследуют широкий круг тем, в том числе способность мягких роботов касаться окружающей среды и взаимодействовать с ней, потенциальные риски формирования однонаправленных эмоциональных связей человека с роботами и того, для чего должны быть предназначены социальные роботы. Чтобы проиллюстрировать некоторые из этических проблем, связанных с мягкой робототехникой, и возможные риски для общества, авторы обсуждают пример секс-роботов.
Доктора Арнольд и Шойц предлагают три общих принципа разработки мягкой робототехники в контексте социального человека и робота. Они побуждают сообщество мягкой робототехники решать эти этические проблемы как способ повышения качества и эффективности взаимодействия человека и робота. «Технология мягких роботов скоро принесет нам машины, которые напрямую взаимодействуют с людьми; важно, чтобы мы начали думать о влиянии, которое они могут иметь на социальные ситуации. В этом документе излагаются некоторые из основных проблем и даются отличные рекомендации для серьезного обсуждения взаимоотношения человека и робота», — заключает Барри А. Триммер, доктор философии, который руководит лабораторией нейромеханики и биомиметических устройств в Университете Тафтса (Медфорд, Массачусетс).
Читать также
Создана первая точная карта мира. Что не так со всеми остальными?
Посмотрите на фотографии планетарных туманностей, сделанные «Хабблом».
Физики создали аналог черной дыры и подтвердили теорию Хокинга. К чему это приведет?