
Четвероногий робот Дайрет (Dyret) регулирует длину ног, чтобы приспособить тело к поверхности. Попутно он учится, как передвигаться лучше всего.
Имя Dyret (по-норвежски «животное») является аббревиатурой от Dynamic Robot for Embodied Testing — «Динамический робот для воплощенного тестирования».
«Мы продемонстрировали преимущества того, что робот может постоянно адаптировать форму своего тела. Наш робот доказывает, что это можно легко сделать с помощью современных технологий», — объясняет старший преподаватель Департамента информатики UiO Тоннес Найгаард.
В случае с Дайретом изменение формы тела означает, что он регулирует длину ног. Механизм адаптации формы тела оказался очень полезен для робота.
Ранее ученые показали, что их робот адаптируется к различным средам в контролируемых условиях в помещении. Затем Найгаард провел полгода с другими инженерами в Организации научных и промышленных исследований Содружества (CSIRO) в Австралии. Она специализируется на тестировании самообучающихся роботов на открытом воздухе.
«Раньше считалось, что этого слишком сложно достичь в реальном мире. С помощью роботов и наших экспериментов мы показали, что это возможно», — объясняет Найгаард в интервью Titan.uio.no. Результаты работы опубликованы в журнале Nature Machine Intelligence.
Изменяя длину своих ног, робот может автоматически менять и форму тела. Морфологически адаптивные роботы могут работать в непредсказуемой среде и решать новые задачи без необходимости переделывать сою структуру или перестраиваться каждый раз, когда они сталкиваются с чем-то неожиданным.
Для людей трудно представить, как трудно роботу переходить, например, от бетона к траве. Не стоит забывать, что у человека есть многолетний опыт и довольно много чувств по сравнению с роботом.
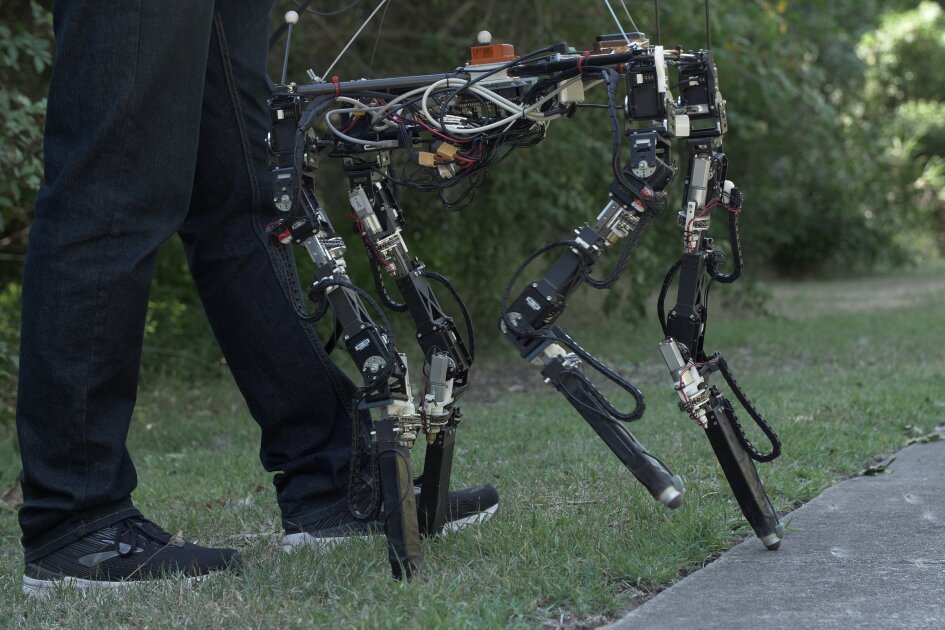
«Робот использует камеру, чтобы увидеть, насколько неровная местность, и датчики в ногах, чтобы определить, насколько жесткая поверхность для ходьбы, — объясняет Найгаард. — Дайрет постоянно узнает об окружающей среде, по которой он идет, и в сочетании со знаниями, полученными в помещении в контролируемой среде, использует это для адаптации своего тела».
Когда Дайрета попросили пройтись по траве, он никогда раньше не видел травы. Он тренировался только на гравии, песке и бетоне. Тем не менее, он быстро научился ходить по австралийской траве и какова была идеальная длина ног. Выяснилось, что более короткие ноги обеспечивают лучшую устойчивость роботу, в то время как более длинные — более высокую скорость ходьбы, если грунт достаточно предсказуем.
Плоский газон может быть не самой большой проблемой, но трава в природе полна пучков и ям, которые могут заманить в ловушку длинноногого робота, поэтому Дайрет укорачивает свои ноги. На бетоне он может их вытянуть и «убежать».
Робот также адаптируется к повреждениям при столкновении с непредвиденными препятствиями.
«Используя нашу технологию, робот может адаптироваться к тому, что одна из его ног становится слабее или ломается. Он может научиться восстанавливаться, хромая или уменьшая длину трех других ног», — говорит Найгаард. Обучаясь на своих ошибках и поломках, Дайрет лучше приспосабливается к окружающей среде.
Пока Дайрет не готов брать на себя серьезные задачи. Целью докторской степени Найгаарда было разработать технологию и найти подходящие материалы, а также доказать, что это возможно. Тем не менее, он видит несколько возможных применений в будущем. Например, робот пригодится при поисково-спасательных операциях, а также в сельском хозяйстве, где существует широкий спектр сложных поверхностей и погодных условий. Также Дайрет поможет при разведке шахт, куда людям трудно добраться.
Читать далее
Физики создали аналог черной дыры и подтвердили теорию Хокинга. К чему это приведет?
Уран получил статус самой странной планеты в Солнечной системе. Почему?
Научный прибор SuperCam с ровера Perseverance прислал на Землю первые результаты



