
Биологи из Калифорнийского университета в Беркли изучили физические показатели белок при передвижении, чтобы создать таких же проворных роботов.
Исследователи из Калифорнийского университета в Беркли изучили, то как белки прыгают и приземляются, чтобы понять, как они принимают решения и так ловко перемещаются.
Способ передвижения белок вдохновил инженеров на создания таких же проворных роботов.
При прыжке мы должны следить за движением нашего тела и оценивать окружающую среду. Теперь мы можем понять, на чем основывается этот контроль и как он работает, благодаря белкам: с помощью этих животных мы сделает самых гибких и умных роботов.
Роберт Фулл, профессор интегративной биологии
В новой работе авторы изучили, как себя ведут белки в свободном полете, как они учатся прыгать с разных типов мест, как они меняют свою позу уже в воздухе и что делают после приземления.
Они также обратили внимание, на то, что чем тоньше или меньше ветка, с которой приходится прыгать белкам, тем они осторожнее. Однако спустя несколько попыток грызуны приспособиться и к этому.
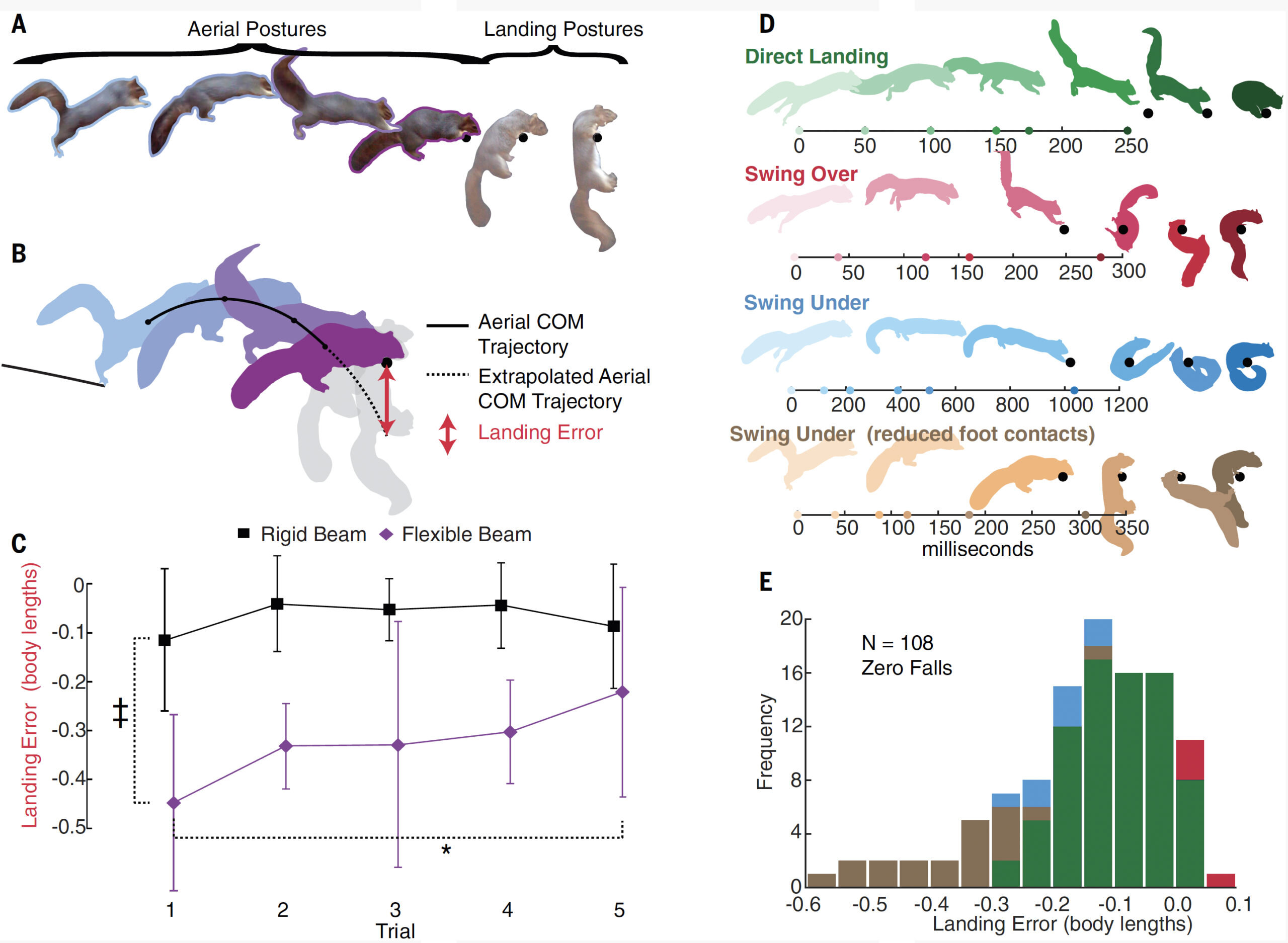
Авторы отмечают, что когда белки решаются на прыжок, то оценивают на сколько гибкая под ними ветки и каков размер пропасти под ними. И когда оказывается, что ветка слишком шаткая или маленькая, то белке нужно всего несколько прыжков, чтобы привыкнуть к этим новым условиям. Такая поведенческая гибкость, отмечают авторы, основа их ловкого передвижения по любой местности.
Одним из неожиданных наблюдений стали то, что белки во время сложных прыжков отталкиваются от вертикальной поверхности, как например это делают в паркуре.
На основе собранных данных ученые создадут универсальных роботов, которые также, как и белки, будут ловко прыгать и передвигаться по бездорожью, например в местах стихийных бедствий или аварий.
Читать далее:
Замедление вращения Земли вызвало выброс кислорода на планете



