Ученые сделали фреймворк для роботов, который выстраивает безопасные маршруты по неструктурированной местности только на основе движений человека-оператора.
Существующие подходы к планированию маршрутов для роботов делятся на две категории:
- Первый тип — доверить управление роботом обученному человеку: он полностью управляет его движением и траекторией
- Второй тип — научить роботов планировать свой путь и двигаться автономно.
До сих пор второй тип управления роботами остается ненадежным, так как не всегда можно предугадать местность и случайные события по ходу движения. Также в этом случае обычно требуется дорогостоящее оборудование и датчики.
В новой работе исследователи из Университета Тренто разработали альтернативную структуру для планирования траектории робота. Она позволяет роботам определить и изучить безопасные пути до пункта назначения на основе движений человека-оператора.
Безопасность имеет первостепенное значение, если человек взаимодействует с роботом в неструктурированном пространстве полном других людей. Основная цель нашей работы состояла в том, чтобы делегировать рутину планирования маршрута от робота к человеку, который, однако, должен сосредоточиться только на том, по какому маршруту двигаться. Робот способен запоминать пройденный путь и использовать его в будущих миссиях.
Алессандро Антонуччи, один из исследователей
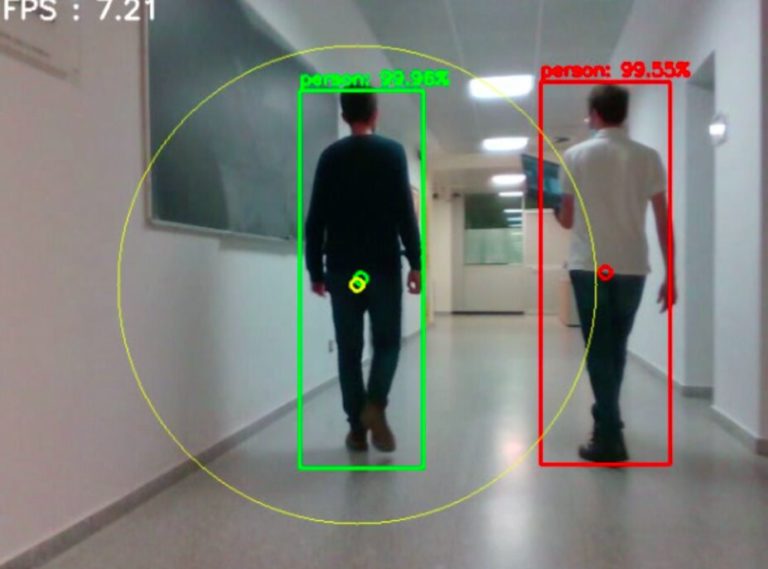
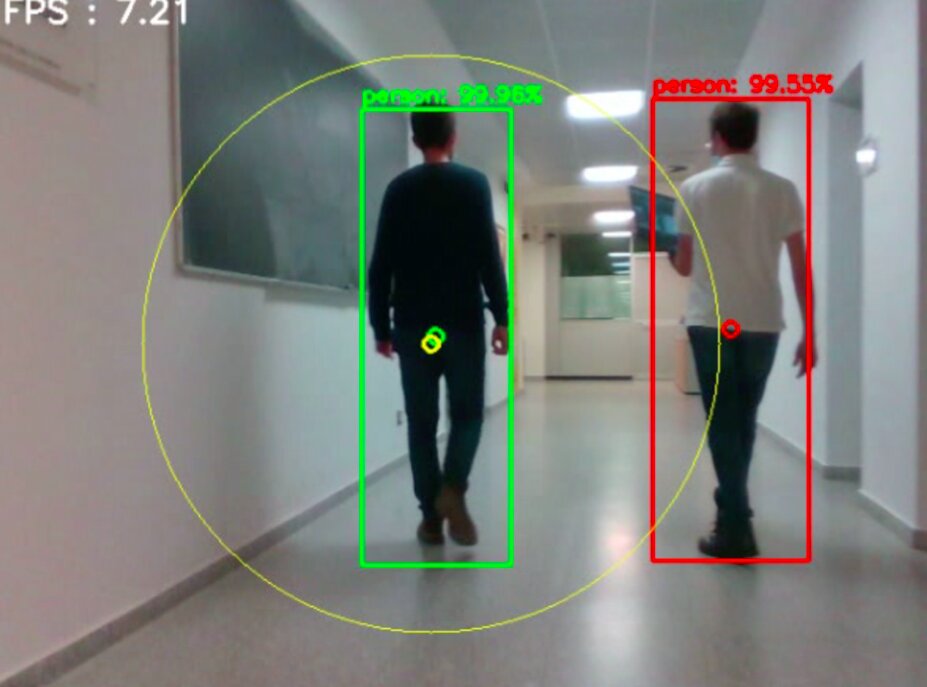
Подход, разработанный Антонуччи и его коллегами, значительно упрощает задачу планирования траектории и для него не требуются дорогие датчики или другие наукоемкие программные компоненты. По сути, фреймворк позволяет роботам распознавать человека-оператора, чтобы фиксировать его действия и движения.
Робот может различать людей и определять расстояния до объектов.

Читать далее:
Замедление вращения Земли вызвало выброс кислорода на планете
Исследование: течение Гольфстрим может стать причиной необратимого коллапса на планете
Посмотрите на наскальное искусство неандертальцев, которому более 60 тыс. лет



