
Исследователи из Университета Аризоны разработали новый подход на основе высокоточного алгоритма обнаружения объектов.
Новый высокоточный алгоритм YOLO находит определенные объекты в потоке изображений с камеры. Также используется метод ассоциации, чтобы обозначить набор точек с радара.
Алгоритм глубокого обучения, который использует радар, нужно обучать на большом количестве маркированных данных — это нетривиальный, чрезвычайно трудоемкий процесс, который обычно делают вручную. Наша идея здесь заключалась в том, что если камера и радар смотрят на один и тот же объект, то вместо того, чтобы просматривать изображения вручную, мы можем использовать систему обнаружения объектов на основе полученных кадров (в нашем случае YOLO) для автоматической маркировки данных радара.
Ариндам Сенгупта, доктор философии и студент Университета Аризоны
Авторы выделили три характерные особенности подхода:
- возможность совместной калибровки,
- кластеризация,
- ассоциации.
Этот подход совместно калибрует радар и его камеру. Это нужно, чтобы определить, как местоположение объекта, обнаруженного радаром, будет отображаться на камере.
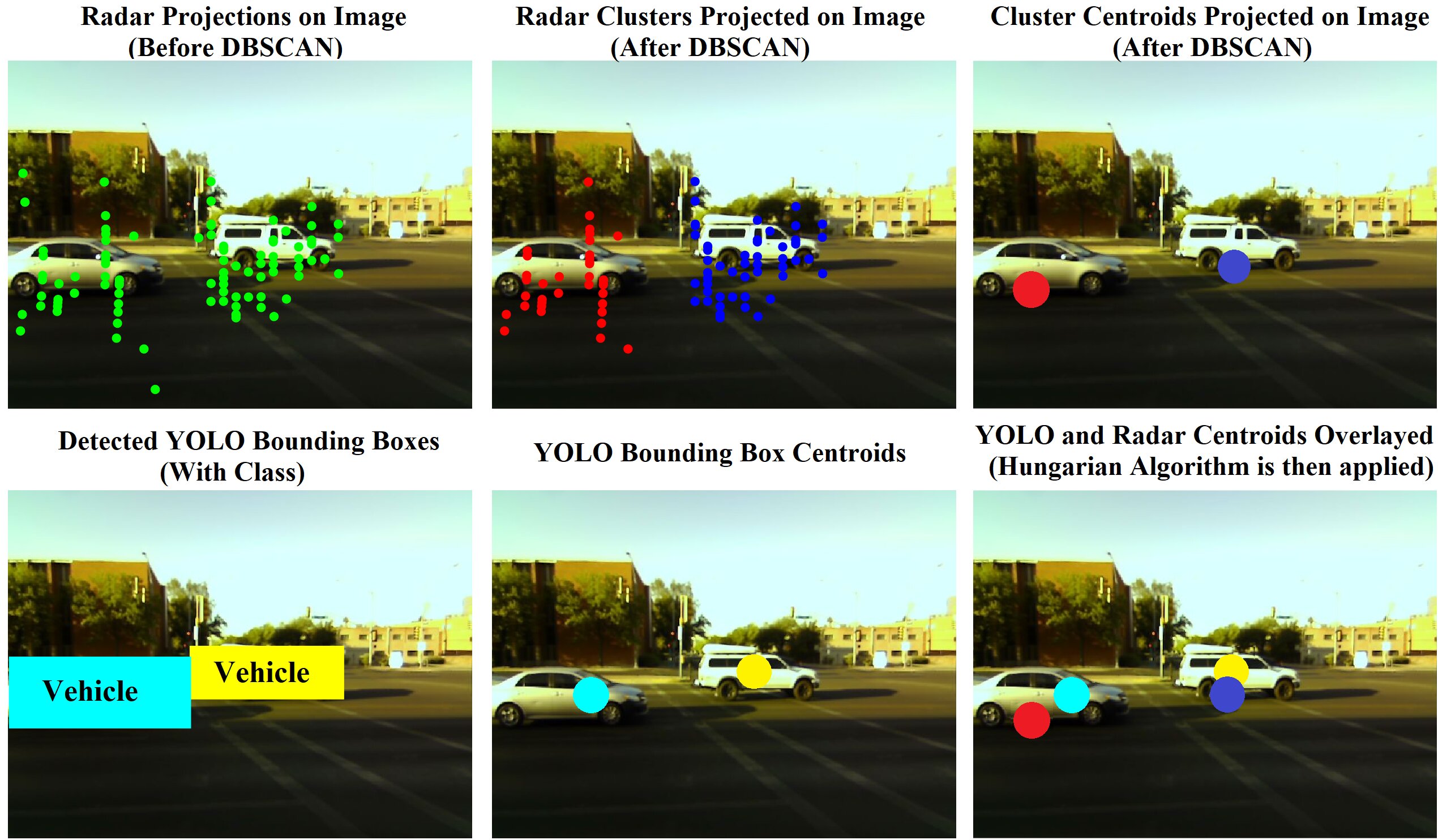
Мы использовали схему кластеризации на основе плотности (DBSCAN) для устранения помех и рассеянных радиолокационных сигналов, а также для разделения радиолокационных сигналов в кластерах. Последнее нужно, чтобы различать отдельные объекты. А для ассоциаций используется внутрикадровый и межкадровый венгерский алгоритм (HA).
Ариндам Сенгупта, доктор философии и студент Университета Аризоны
Разработчики считают, что их подход поможет автоматизировать создание наборов данных для радарных камер и радаров. Кроме того, в своей статье команда исследовала как схемы классификации, основанные на объединении датчиков радарной камеры, так и на данных, собранных только радарами.
Читать далее
Самое большое генеалогическое древо человечества показало историю нашего вида
Физики воссоздали способности Т-1000 из «Терминатора-2» в лаборатории
Ученые, возможно, нашли недостающее звено между одноклеточными и клетками человека



