Ученые из MIT создали роботизированный захват, который способен адаптироваться к объекту, с которым взаимодействует, а также обеспечивает тактильную реконструкцию предмета с высоким разрешением. Устройство было продемонстрировано на 5-й ежегодной конференции RoboSoft.
Профессор Эдвард Андерсон из Массачусетского технологического института и его аспирантка Сандра Лю разработали роботизированный захват с использованием новых пальцев GelSight Fin Ray, которые, как и человеческая рука, достаточно гибки, чтобы манипулировать объектами. Как отмечают ученые, особенность их разработки в специальных сенсорных датчиках, которые не только соответствуют, но во многом превосходят чувствительность человеческой кожи.
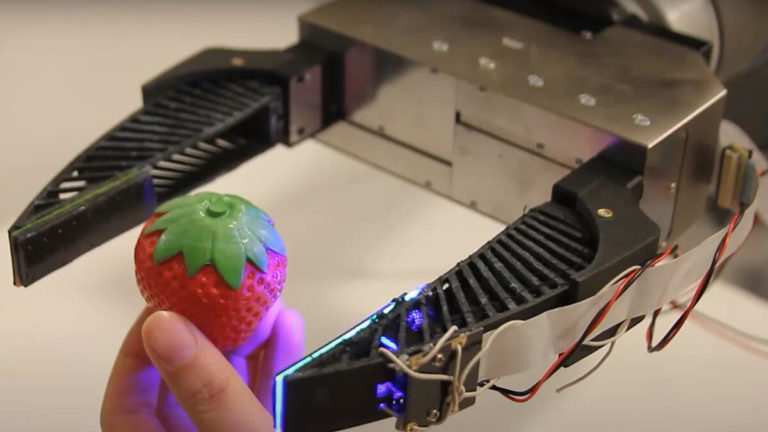
Захват состоит из двух гибких ребристых пальцев, которые адаптируются к форме объекта, с которым они соприкасаются. Эти пальцы, как и во многих аналогичных разработках, изготовлены из гибких пластиковых материалов на 3D-принтере. Однако в своем роботе инженеры удалили поперечные ребра, расположенные на внутренней стороне пальцев и придающие им жесткость. Вместо них исследователи установили камеру и датчики.
На внешней стороне полости устанавливается тонкий акриловый лист, к которому прикрепляются «чувствительные» подушечки из силиконового геля. В глубине полости размещается камера, направленная в сторону акрилового слоя, а вся полость освещается светодиодами.
При касании предмета палец плавно обхватывает его, сливаясь с контурами объекта. Камера и специальные алгоритмы анализируют изменение силиконового и акрилового листов. На основе анализа робот определяет общую форму объекта, неровности поверхности, ориентацию объекта в пространстве и силу, с которой необходимо сжимать предмет.
Исследователи протестировали работу своего захвата, сделав сенсорным только один из двух пальцев. Созданное ими устройство успешно манипулировало разными предметами, например, мини-отверткой, пластиковой клубникой, тюбиком с краской и бокалом для вина. При этом при захвате клубники внутренний датчик смог успешно обнаружить зернистость ее поверхности, а при работе с банкой — прочитать выгравированное название.
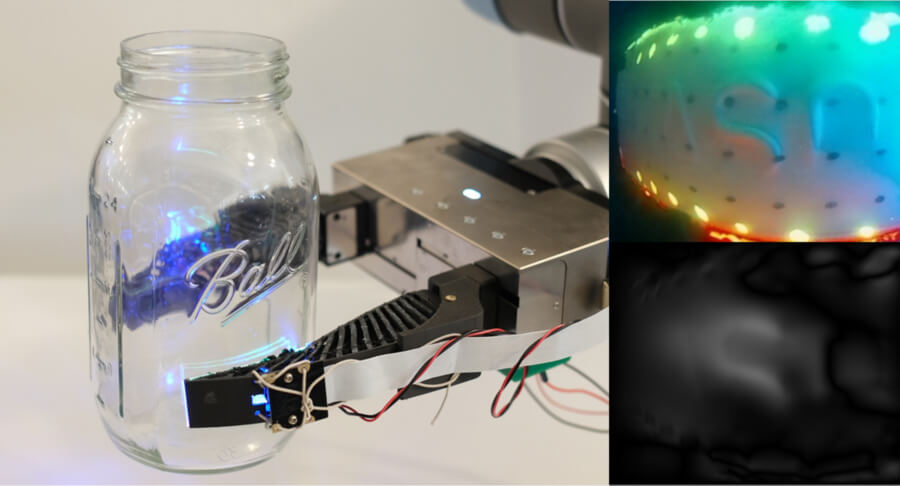
Как отмечают авторы работы, стеклянные объекты представляют собой сложную задачу для сенсоров на основе компьютерного зрения из-за преломления света. Тактильные датчики позволяют обойти это ограничение. Когда захват поднимал бокал, он чувствовал ориентацию ножки в пространстве и мог убедиться, что стакан направлен вверх, прежде чем опустить его на стол.
Инженеры отмечают, что создание полости внутри пальца незначительно нарушило стабильность захвата. Ученые планируют доработать дизайн своего устройства, чтобы исправить этот недостаток. Кроме того, они планируют разработать захват с тремя пальцами, который сможет, например, собирать кусочки фруктов и оценивать их зрелость.
Читать далее:
В MIT создали неподвижный тепловой двигатель, который превзошел КПД турбин
Спустя десять лет работы ученые усомнились в стандартной модели физики



