
Исследователи из MIT разработали технологию компьютерного проектирования и цифрового массового производства мягких пневматических приводов с помощью машинного вязания. Метод печати представили на конференции «Человеческий фактор в компьютерных системах».
Ученые из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института разработали масштабируемый конвейер для проектирования и изготовления мягких пневматических приводов под названием PneuAct.
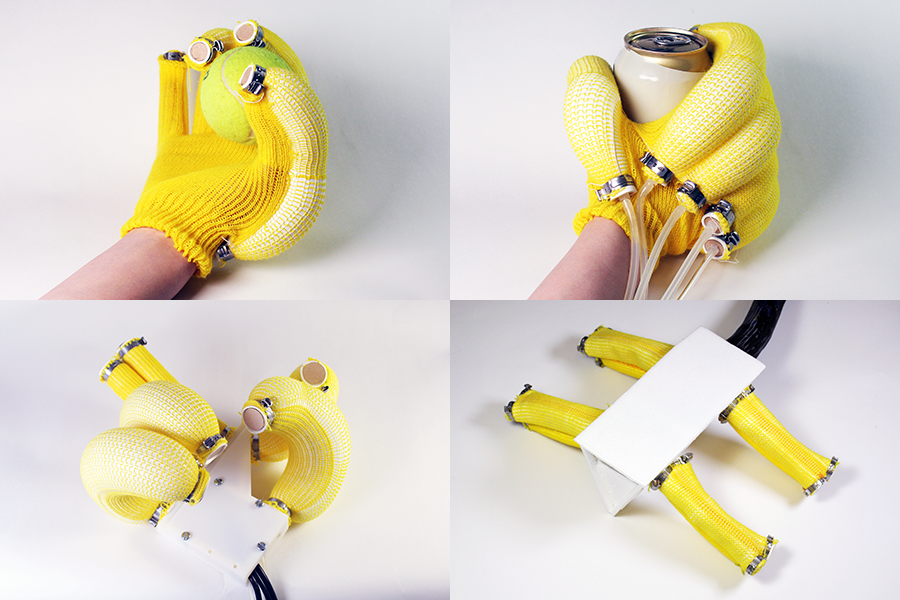
Система использует процесс машинного вязания для создания банановых «пальцев», как их называют сами авторы. Этот процесс мало чем отличается от традиционного вязания спицами. Дизайнер-человек задает шаблоны стежков и датчиков в системе, чтобы запрограммировать, как будет двигаться привод, моделирует его форму. Готовая текстильная деталь прикрепляется к недорогой силиконовой трубке.
Вязаный привод включает в себя проводящую нить, отвечающую за «восприятие». С ее помощью привод «чувствует», к чему он прикасается. Ученые использовали комбинацию эластичных и сенсорных стежков (с проводящей нитью), что позволяет программировать изгиб устройств при их надувании, а также возможность учитывать обратную связь при использовании.
Команда подготовила несколько прототипов, включая вспомогательную перчатку, мягкую руку, интерактивного робота и четвероногое животное с пневматической ходьбой. При этом робот «чувствовал», когда к нему прикасаются руки человека, и реагировал на это прикосновение.
Инженеры говорят, что человек может носить вспомогательную перчатку, чтобы дополнить движение мышц пальцев, сводя к минимуму уровень собственной мышечной активности. Это может быть полезно в случае травмы, ограниченной подвижности или даже при создании экзоскелетов.
Исследователи отмечают, что система может использовать различные датчики. Например, при проектировании они использовали «резистивный датчик давления», чтобы определить какую силу захват прикладывает к объекту. А для того, чтобы понять из чего состоят предметы, с которыми взаимодействовал захват, использовалось емкостное зондирование. Все эти датчики легко встраиваются в нить.
Читать далее
Посмотрите на «бесшумный» дрон с ионным двигателем нового поколения
Ученые придумали, как найти темную материю, используя обычный завод
Астрономы изучили 4 скопления звезд в Млечном Пути: одно из них ведет себя странно



