

Ученые придумали, как улучшить маневренность дрона, чтобы при этом он летал на большой скорости — 64 км/ч.
Чтобы расширить возможности автономных беспилотных летательных аппаратов (БПЛА), ученые и инженеры работают над различными решениями. Недавно группа исследователей разработала модель аппаратного и программного обеспечения с открытым исходным кодом, которая обещает повысить маневренность квадрокоптеров (дронов, работающих на четырехроторной системе). При этом дрон сможет летать на огромной для квадрокоптеров скорости — более 64 км/ч.
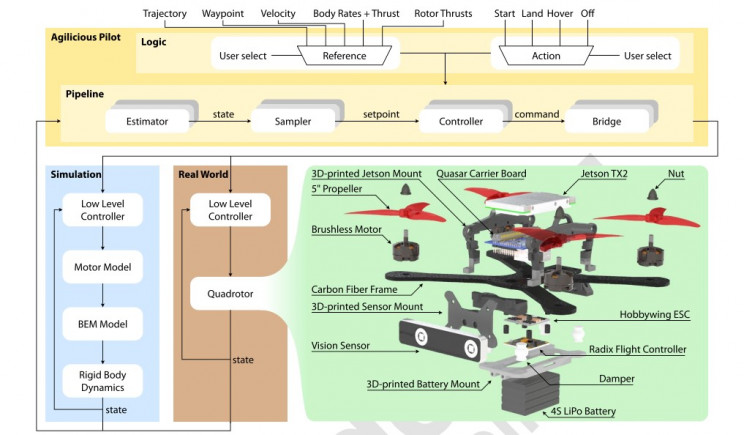
Модель называется Agilicious, и исследователи утверждают, что она может сделать квадрокоптеры более подходящими для преодоления препятствий и отслеживания траекторий даже на высоких скоростях во время их путешествий. Более того, модель полезна как в реальных полетах, так и в виртуальных симуляциях.
«Открыв исходный код Agilicious, мы предоставляем научно-исследовательскому и промышленному сообществу доступ к очень гибкой, универсальной и расширяемой платформе квадрокоптера», — заявили исследователи.
Источник:
Научная робототехника
В своей платформе Agilicious они использовали передовые бортовые датчики зрения, системы мониторинга полета и другие компоненты. Они, в конечном итоге, улучшили восприятие дронов в реальном времени, отслеживание траектории и навыки планирования полета.
Кроме того, платформа также оснащена NVIDIA Jetson TX2, мощным и энергосберегающим модулем искусственного интеллекта, который выполняет сложные вычислительные задачи для поддержки своих аппаратных функций.
Читать далее:
Юная звезда «спрятала» то, что изменило представление ученых о Вселенной. Главное
Ученые раскрыли, как витамины влияют на заболеваемость раком
Легкий способ похудения во сне скоро испытают на добровольцах



