

Дроны нужны не только для развлечений и съемок красивых видов, они способны на большее. Исследователи уже делают беспилотники, которые общаются друг с другом и ищут тонущих людей. Они же представляют устройства, которые доставляют товары быстрее любого курьера. Летающее беспилотное такси — тоже не фантазия ученых, а транспорт будущего. Что нам ждать и какие устройства разрабатывают в Иннополисе — в своей лекции рассказал Роман Федоренко, экс-доцент Лаборатории специальной робототехники Университета Иннополис.
Кто такие роботы?
Несколько лет назад на Reddit появилась классная штука — ученые описывали сложные исследования одной простой фразой. Если бы меня попросили так сделать, я бы сказал, что робототехника — область, где можно увидеть, как двигается код.
Робототехника — это синергетическая прикладная сфера деятельности. Она состоит из программирования, мехатроники и кибернетики. Мехатроника — это то, что взаимодействует с реальным миром. А кибернетика — многозвенная наука, которая включает в себя, прежде всего, управление созданными программами.
Что такое робот? 15 лет назад многие бы сказали, что это робот-манипулятор, который работает на заводе и занимается сваркой или покраской. Другой популярный ответ — это робот-андроид из мира кино. Но является ли роботом подвижная тележка или беспилотный автомобиль? Да, это тоже одна из областей роботехники. Летательные аппараты — тоже роботы, одни из самых последних разработок включают в себя интеллектуальные технологии и являются, по сути, автономными роботами.

Еще есть такая область робототехники как field robotics — «мобильная робототехника». Сюда включают всех роботов, которые двигаются в поле, здании или под водой. Самое интересное применение, на мой взгляд, — это сельское хозяйство.
История летательных аппаратов
История летательных аппаратов началась в прошлом веке. До этого летали только воздушные шары без двигателя, и их сложно было назвать роботами. В начале прошлого века функционировали два типа летательных аппаратов — дирижабли и самолеты. Первый управляемый полет совершили братья Райт. Причем первый автопилот появился довольно быстро, практически через 10 лет после этого, он помогал стабилизировать полет.
Текущее направление робототехники связано с развитием и доступностью новых открытых автопилотов, таких как PixHawk (PixHawk — открытое аппаратное обеспечение для контроллеров, дронов и других БПЛА. Его используют для академических, любительских и профессиональных целей). Пример прихода дронов в жизнь каждого человека — доставка пиццы компанией «Додо Пицца» совместно с «Коптр экспресс» — это произошло в 2014 году.

Как управляется дрон
Современные летательные аппараты используют один из трех принципов создания подъемной силы — аэростатический, реактивный или аэродинамический. Аэродинамический принцип полета и создания подъемной силы (отбрасывание вниз части воздуха) можно реализовать либо за счет движения всего аппарата, снабженного неподвижной несущей поверхностью (крыло), либо за счет движения отдельных несущих частей аппарата (несущий винт, вентилятор) относительно воздушной среды.

У дрона есть винт, который создает подъемную тягу. Оторвавшись от земли, устройство начинает двигать винтом быстрее и поднимается вверх. Но сила действия равна силе противодействия. При вращении винта создается момент в другую сторону — с этим связана конструкция вертолетов и коптера. Если у вертолета будет один винт — он не будет стабильным. Поэтому устройство использует либо схему с двумя винтами, либо хвостовой винт.
В квадрокоптере очень простая конструкция — у него обычно четыре винта, два из которых вращаются в одну сторону, а два — в другую. Если пользователю нужно двигаться вперед, то одни винты вращаются медленнее, а другие — быстрее. А если пользователь хочет повернуть, то одни винты, размещенные по диагонали, ускоряются, а другие — замедляются.

Движения коптера по углам связаны с движением по координатам. Если пилот хочет двигаться вперед, нужно сначала наклонить дрон вперед, а затем, когда устройство на электротяге потянется вперед, стабилизировать его в той точке, где мы хотим остаться.
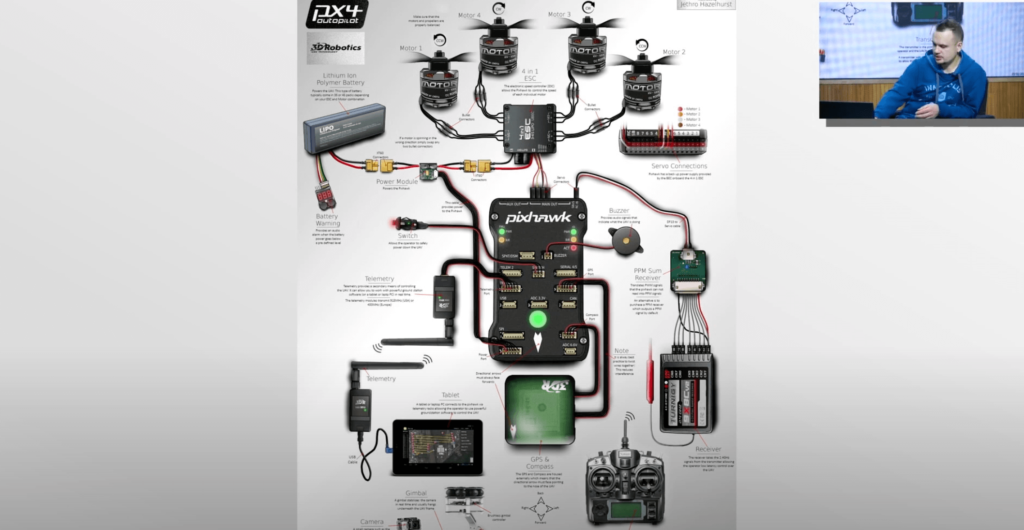
Это схема одного из самых популярных автопилотов, на базе которого можно сделать новые устройства. Он подключается ко всем моторам и датчикам. Причем у моторов есть свой блок управления, регулятор ESC — Electronic Speed Controller, управляющий оборотами мотора.
Из сенсоров здесь есть GPS, чтобы дрон мог работать вне помещений, летать по точкам и стабилизировать положение. Но внутри самого автопилота также есть IMU — модуль инерциальных датчиков, который позволяет ему определять углы ориентации. Также есть канал связи, наземный пункт управления и батарея.
Как говорилось выше, существует некий уровень управления двигателем — мы, уже не задумываясь, можем задать скорость вращения. По тому же принципу работают и остальные уровни: следующий — это управление ориентацией.
Но прежде нам нужно управлять скоростью вращения — на этом уровне летают FPV-коптеры (устройства, которые позволяют наблюдать за картинкой с камеры дрона в режиме реального времени от первого лица (FPV – First Person View). Опытные пилоты задают скорость вращения и постоянно подруливают джойстиком. Следующий этап — когда пользователь может стабилизировать угол, но при этом дрон все равно будет двигаться. Дальше — контроль скорости, а самый высокий — это позиционное управление, маневры для движения в точку или движение по заданной траектории.
Те, кто хотят программировать, собирать и управлять дронами — должны обратить внимание на opensource-автопилот PIX4. Вокруг воздушной роботехники есть целое сообщество (ROS — robotic operating system, или Open robotics), есть симуляторы для дронов. Поэтому многие эксперименты можно совершить в симуляторе, не имея самого дрона.
Стадии разработки дрона
Исследователи начинают с концептуального моделирования, а затем им нужно построить точную модель аппарата. Не углубляясь в формулу, модель коптера — это, по сути, модель твердого тела. Это второй закон Ньютона, расширенный на системы частиц. Он имеет поступательное и вращательное движение, есть кинематика и динамика движения, а чтобы описать модель конкретного аппарата, мы должны добавить сюда уравнение сил, действующих на конкретный дрон.

Следующим этапом является разработка системы управления. Если идти классическим способом: сначала мы узнаем точную математическую модель и на ее основе уже синтезируем алгоритм управления или новые формулы. В систему управления можно включать все уровни: планирование движения, восприятие среды, оценивание состояния с помощью датчиков. Алгоритмы позволяют уточнять наши координаты и данные.

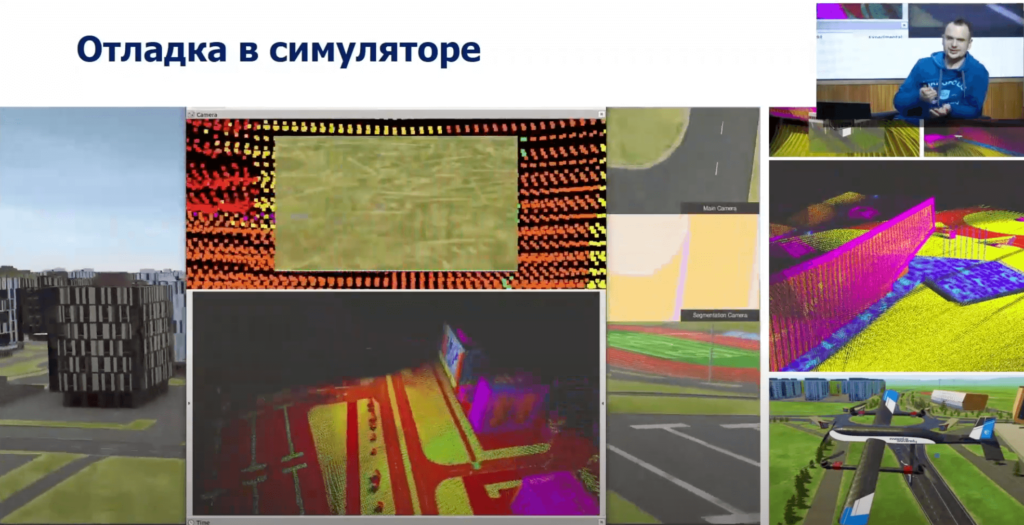
Когда есть алгоритм управления, его можно сразу применять, но делать это довольно затратно. Устройства падают при малейшей ошибке — это надо учитывать и делать резервные копии. Для тестирования используются симуляторы.
Ниже показана виртуальная экскурсия по Иннополису — продукт нашего университета, он доступен для скачивания на GitHub. Это не только визуальная составляющая, но и данные всех датчиков аппарата. У него есть все позиционные датчики, им управляют как дроном и могут отлаживать все алгоритмы управления.
Когда на основе опыта с симулятором появляется больше уверенности — можно переходить к аппаратной реализации. Здесь показаны ее составляющие: изготовление аппарата из карбона и композита, создание электроники, размещение двигателей, их крепление.
Тесты начинаются не на улице: сначала устройства тестируются на подвесе или специальном стенде. На них можно отлаживать элементы функционирования беспилотного летательного аппарата. Например, здесь показан самолет вертикального взлета и посадки — это гибрид коптера и самолета, на видео можно увидеть, как он справляется со внешними возмущениями и держит угол. Справа показан довольно безумный эксперимент, когда запускают пять двигателей одновременно и смотрят, как система управления справляется с этим.

После тестирования переходят к подлетам — небольшие взлеты на небольших скоростях, управляемое движение с пилотом, который может перехватить контроль. Финальным аккордом является полностью беспилотный полет.
Устройство взлетает вертикально — «по-коптерному», потом у него включается маршевый двигатель, беспилотник разгоняется, переходит в самолетный режим, развивает достаточную скорость, чтобы работало крыло. Затем контурные винты выключаются, и он летит по-самолетному — процесс посадки осуществляется в обратной последовательности.
Что происходит с беспилотниками
Одна из задач, над которой работают современные ученые — обход препятствий при полете. Некоторые дроны уже умеют это, но задача стоит чуть шире — надо научить устройства как можно быстрее двигаться в среде с препятствиями. И тут по-прежнему есть куда стремиться и улучшать алгоритмы.
Еще один пример такого тестирования — полет в лесу. Есть очень интересный подход — здесь применяются не только новые алгоритмы, но и сенсорика — ивенткамера. Это очень высокочастотная камера, которая передает разницу между кадрами в каждую единицу времени: это позволяет быстро осуществлять управление и реагировать на препятствия.
В области планирования движения дрона проводятся соревнования: кто быстрее это сделает. Задача состоит в том, чтобы картографировать неизвестную область, построить ее трехмерное представление, найти на ней объекты. Мы летали в университете, но тоже решали задачу поиска объектов. Наши результаты были даже лучше, чем у известных опубликованных алгоритмов.
Существуют соревнования и по гонке дронов. Они делаются на устройствах с камерой, когда у пилота есть очки и он управляет дроном, чтобы максимально быстро пролететь через ворота. Довольно зрелищное мероприятие, где ту же задачу надо выполнить и в автоматическом режиме. К сожалению, пока компьютеру удалось победить человека только в шахматы, а робот-дрон не смог обогнать человека-пилота, хотя прогресс уже довольно серьезный. Дрон с помощью алгоритма машинного зрения может выполнять такие задачи, работа идет только на увеличение скорости.
Еще одно соревнование — Microsoft Games of drones, оно проводится в симуляторе. В этой же области проводится одно из известных ведущих соревнований в Саудовской Аравии. Участники там набираются на три года вперед.
Беспилотные устройства используют для шоу дронов — это зрелищные мероприятия, которые сегодня стали заменой салютам. Но это не единственное групповое применение — они могут инспектировать большую область.
Где применяют
Чтобы это не выглядело как исключительно научные разработки, ниже — демо дрона Skydio. Сейчас это самое совершенное устройство по части автономности. Это пример того, как современные технологии — картография, обход препятствий, планирование движения используются совместно в уже доступном для пользователя продукте.
Еще одно направление — это новые конструкции летательных аппаратов. Одно из них — складные дроны. Одно такое устройство может залетать в узкие пространства для инспекции после аварии. Другой пример — дрон, который может раскладываться. Например, он умеет вылетать из узкой пневматической трубы и дальше лететь в обычном режиме.
У нас тоже есть проект в этой области — это мягкий Tensodrone. Это первый дрон мягкой конструкции, который летает. Удовольствие заключается в том, что его можно ронять и он останется целым. Кроме того, можно изменить длины балок, натяжение тросов.
Два примера, которые воплотятся в жизнь в ближайшее время. Во-первых, доставка с помощью дронов. Сейчас есть очень интересная реализация, когда мы совмещаем почтомат и посадочную станцию дрона — в этом случае не нужно заботиться о том, когда дрон прилетит, куда он сядет, чтобы мы к нему вышли вовремя, забрали груз, пока его не украли. Второй пример — летающее такси. Это самая впечатляющая область разработок, уже есть работающие прототипы. Но это произойдет только в ближайшее десятилетие.
Какие разработки в области летающих такси появлялись за последние 6 лет:
— Компания «Ховер» представила аппарат с малошумным электродвигателем и компактными габаритами — как у автомобиля. Он взлетает на высоту 150 м и садится на стандартное парковочное место. Дрон рассчитан на двух пассажиров, максимальная грузоподъемность — 300 кг, а скорость — 200 км/ч.
— В 2016 году российская компания Hoversurf показала ховербайк, который можно носить с собой и в любой момент взлететь с обычного городского парковочного места. Он развивает скорость до 100 км/ч, а высота подъема принудительно ограничена 5 метрами в целях безопасности.
— В 2018 году разработанный Airbus пассажирский VTOL-самолет Alpha One поднялся на высоту 5 метров и продержался в воздухе 53 секунды. Пользователь сможет вызвать БПЛА через приложение и добраться из одной точки в другую как в черте города, так и за его пределами.
— В 2020 году аэротакси CityAirbus совершило первый свободный полет. Тестирование состоялось в пригороде Парижа, городе Иль-де-Франс.Летательный аппарат CityAirbus способен передвигаться со скоростью до 120 км/час на расстояние до 30 км. Вес летающего такси — более 2,2 т, CityAirbus оборудован тремя пассажирскими местами и одним водительским.
— В 2022 году китайский стартап Pantuo Aviation представил T1 — это демонстратор летающего такси с воздуховодом. Он будет летать со скоростью более 300 км/ч, а дальность полета составит 250 км.
Читать далее:
Космический зонд пролетел в 200 км от Меркурия. Посмотрите, что он увидел
Ученые раскрыли, как витамины влияют на заболеваемость раком
Китайский шлем для «чтения мыслей» бьет тревогу, когда человек видит порноконтент