
Исследователи использовали самонастраивающуюся нейронную сеть для управления роботом. Программа работает как спинной мозг у животных и учится оптимизировать движения робота за короткое время.
Инженеры из Института интеллектуальных систем Макса Планка создали робота размером с собаку, который учился ходить также, как настоящие животные. Работа, опубликованная в Nature Machine Intelligence, поможет понять, как млекопитающие учатся ходить и спотыкаться, и создавать адаптивные роботизированные системы.
Ученые использовали нейронную сеть, которая изначально не настроена идеально для ходьбы, но может адаптироваться в процессе работы. Для обучения авторы работы использовали алгоритм байесовской оптимизации. Программа сопоставляет информацию с датчика стопы с целевыми данными из смоделированного виртуального спинного мозга. Робот учится ходить, постоянно сравнивая отправленную и ожидаемую информацию от датчиков, запуская рефлекторные циклы и адаптируя свои модели управления двигателем.
Алгоритм обучения адаптирует параметры управления центрального генератора шаблонов, объясняют ученые. У людей и животных в качестве такого центра выступают сети нейронов в спинном мозге, которые производят периодические мышечные сокращения без участия головного мозга. Сети центрального генератора паттернов помогают управлять ритмическими задачами, такими как ходьба, моргание или пищеварение.
Исследователи отмечают, что логика созданной программы идентична спинному мозгу животных: он получает информацию и перестраивает модели движения. Например, если робот спотыкается, алгоритм обучения меняет то, как далеко ноги перемещаются вперед и назад, как быстро движутся ноги и как долго нога находится на земле.
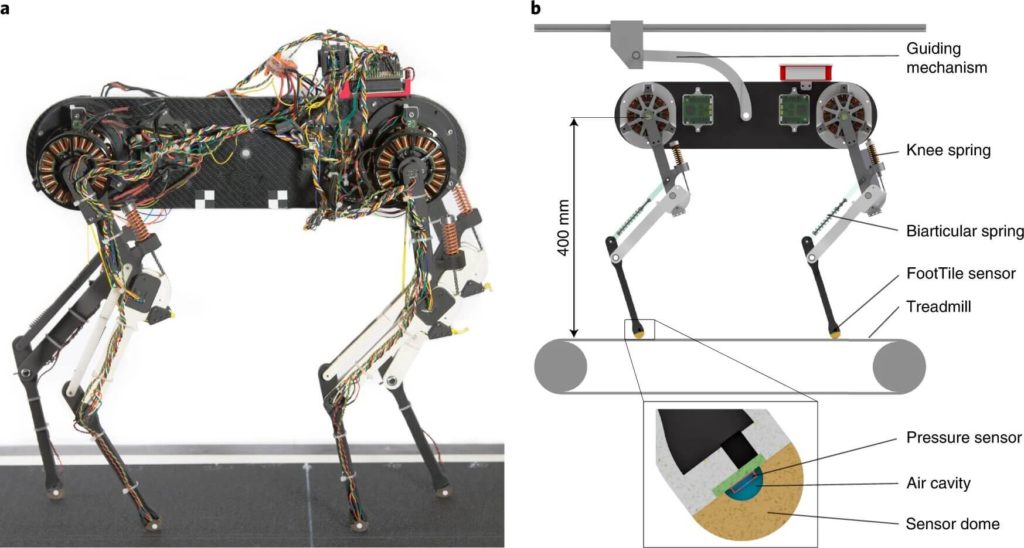
В процессе эксперимента исследователи показали, что роботу хватило одного часа на то, чтобы выработать стабильную походку. При этом, отмечают авторы работы, виртуальный спинной мозг не знает ничего о конструкции ног робота, его двигателях и пружинах. Ничего не зная о физике устройства, он легко адаптирует движения.
Исследователи отмечают, что эта работа поможет не только в развитии робототехники, но также в понимании работы рефлексов и обучения у животных.
Исследовать спинной мозг живого животного не просто. Но мы можем смоделировать его в роботе. Это фундаментальное исследование на стыке робототехники и биологии. Роботизированная модель дает нам ответы на вопросы, на которые биология не может ответить.
Александр Бадри-Спревиц, руководитель исследовательской группы Института интеллектуальных систем Макса Планка, соавтор публикации
Читать далее:
Физики нашли универсальные «часы» в космосе: они точнее атомных
Археологи нашли рисунки жутких людей с огромными головами: кем они были
Телескоп «Джеймс Уэбб» сделал первый снимок Юпитера: на нем сразу 9 двигающихся целей



