
Исследователи оснастили корпус специальной пеной из стеклянных микросфер, которые обеспечивают плавучесть и при этом способны выдерживать огромное давление на глубине 1 км.
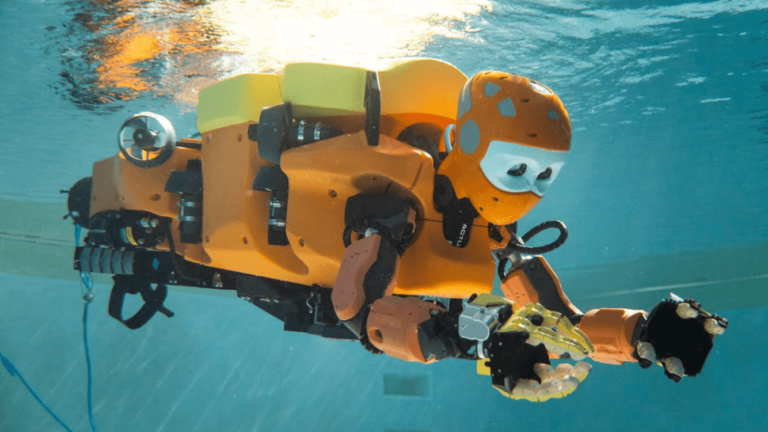
Ученые из Стэнфордского университета разработали подводного робота-археолога OceanOneK. Его верхняя часть гуманоидной формы, а задняя выглядит как промышленная машина с восемью разнонаправленными двигателями. Они позволяют OceanOneK осторожно маневрировать под водой на рекордной глубине — 1 000 метров.
Тактильная или сенсорная система обратной связи робота и стереоскопическое зрение создают невероятно реалистичные ощущения, отмечают ученые, которые уже использовали возможности OceanOneK. «Ощущение, что находишься на глубине под водой, а не на борту корабля, в центре управления», — рассказал Усама Хатиб, специалист по робототехнике из Стэнфордского университета в интервью газете вуза. Глядя глазами робота OceanOneK и ощупывая затонувший корабль «Криспи» механическими руками, инженер даже чувствовал сопротивление воды.

Предшественник OceanOneK, OceanOne построили для погружения глубины не более 200 метров. Чтобы модернизировать модель, исследователи оснастили корпус специальной пеной из стеклянных микросфер, которые обеспечивают плавучесть и при этом способны выдерживать огромное давление на глубине 1 км. Оно в 100 раз больше обычного. Кроме того, руки робота заполнены маслом и пружинным механизмом, который сжимает его в ответ на внешнее давление, предотвращая разрушение и амортизируя электронику.
Также инженеры обновили множество крошечных компонентов по всему корпусу OceanOne, чтобы свести к минимуму количество сжимаемого воздуха в отдельных его частях и оставить робота как можно компактнее.
Читать далее:
Физики нашли универсальные «часы» в космосе: они точнее атомных
Археологи нашли рисунки жутких людей с огромными головами: кем они были
Телескоп «Джеймс Уэбб» сделал первый снимок Юпитера: на нем сразу 9 двигающихся целей



