Инженеры создали прототип роботизированной платформы для космических исследований. О разработке сообщает пресс-служба Итальянского технологического института.
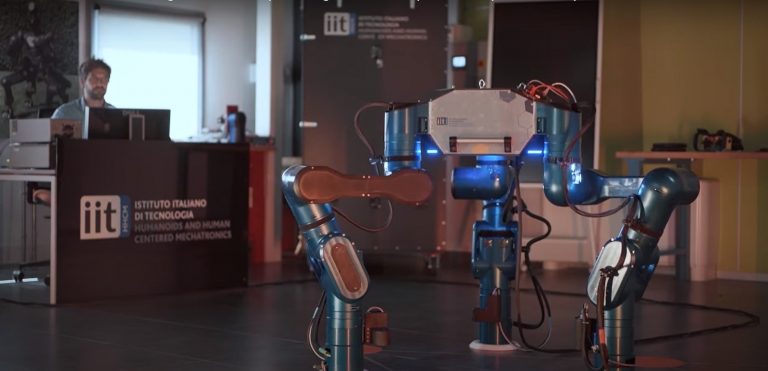
Исследователи из Итальянского технологического института представили прототип трехногого робота, который может ходить, захватывать и перемещать полезную нагрузку и работать в условиях микрогравитации. Устройство будут использовать для помощи астронавтам по обслуживанию космических станций.
Роботизированная платформа MARM состоит из центрального корпуса, трех конечностей и специального стыковочного устройства. Последнее используется для зарядки устройства и обмена данными. При создании робота ученые предусмотрели возможность работы как в присутствии силы тяжести, так и в условиях микрогравитации.
Робот MARM может использовать три конечности для перемещения, захватывая стандартные межсоединения на поверхностях станции и ползая по ним. Кроме того, он может собирать и размещать компоненты различных устройств, например, перемещать и устанавливать модульные шестигранные плиты шириной 1,2 м, которые используются на МКС, а также манипулировать орбитальными сменными блоками.
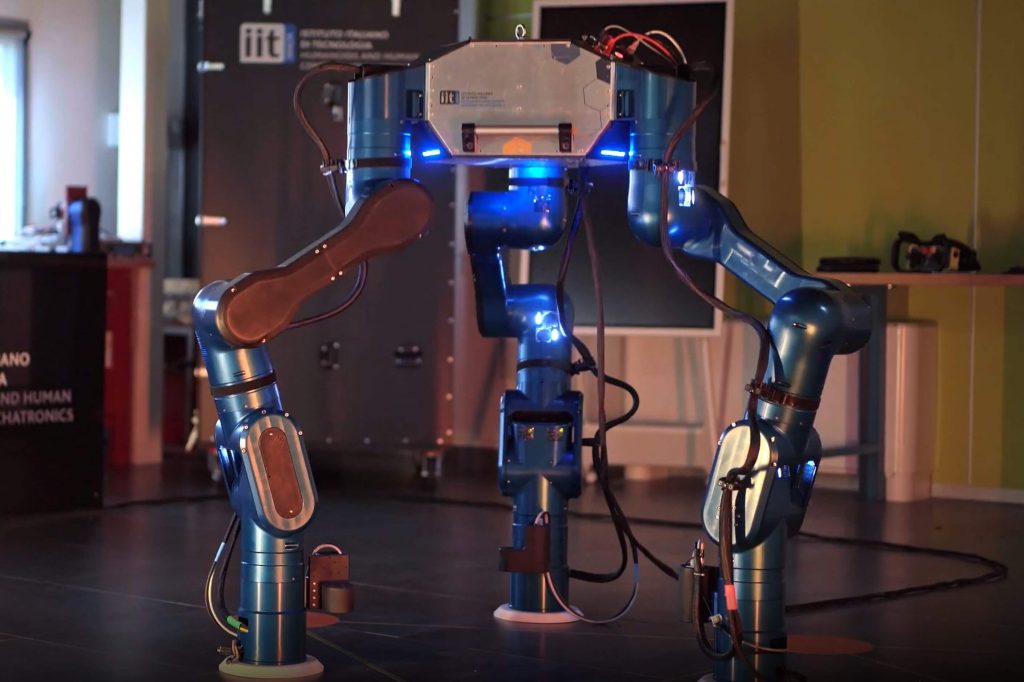
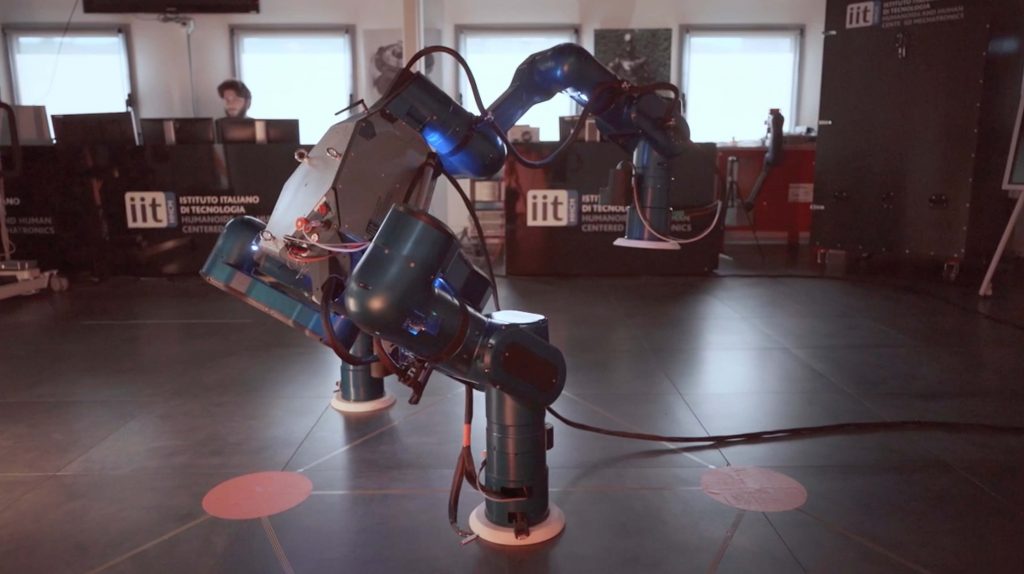
Конфигурация из трех конечностей — основное отличие нового робота от предыдущих разработок. Это, по словам инженеров, обеспечивает большую гибкость в работе устройства. Например, он может использовать две «руки» для работы, удерживаясь на поверхности с помощью оставшейся.
Исследователи предлагают использовать MARM, чтобы забирать грузы со склада, переносить их в нужное место, собирать и размещать. Прототип будет протестирован в условиях микрогравитации с учетом этого сценария, после чего будет создана рабочая версия для отправки на МКС.
Читать далее:
Ученые из зоны вечной мерзлоты: как они разрабатывают умную одежду и вакцину против рака



