Исследователи разработали уникальное крепление, которое позволяет роботу приземляться на ветку.
Инженеры из Федеральной политехнической школы Лозанны разработали метод, который позволяет роботу с машущими крыльями автономно приземляться на горизонтальную насест с помощью когтеобразного механизма. Инновационная разработка может значительно расширить круг задач, выполняемых роботами, считают авторы исследования.
Посадка птицы на ветку кажется одним из самых естественных процессов. Но на самом деле то требует чрезвычайно точного баланса между временем, силой удара, скоростью и точностью перемещения, отмечают авторы разработки. Не удивительно, что до сих пор инженерам не удавалось воспроизвести эти движения в роботах.
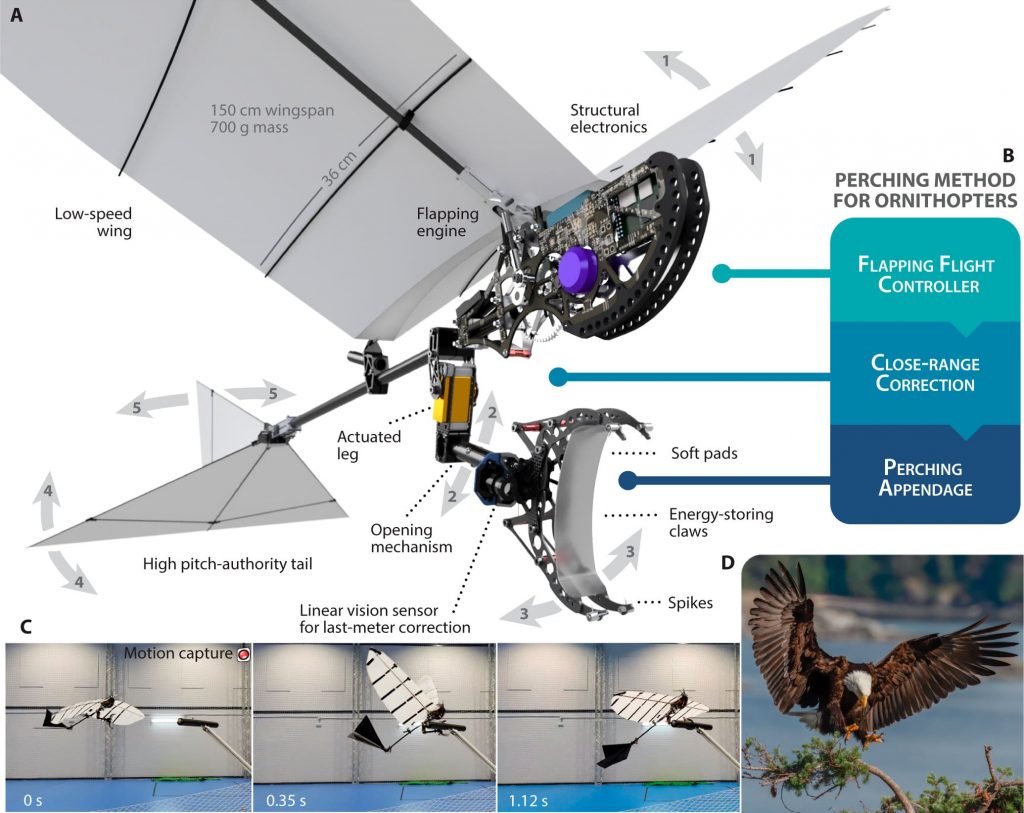
Исследователи решили проблемы точного баланса оснастив орнитоптер бортовым компьютером и навигационной системой. Она использует внешние источники для захвата движения и определения положения устройства. Придаток ноги-клешни орнитоптера был точно откалиброван, чтобы компенсировать колебания вверх-вниз во время полета, когда дрон пытался ухватиться за насест.

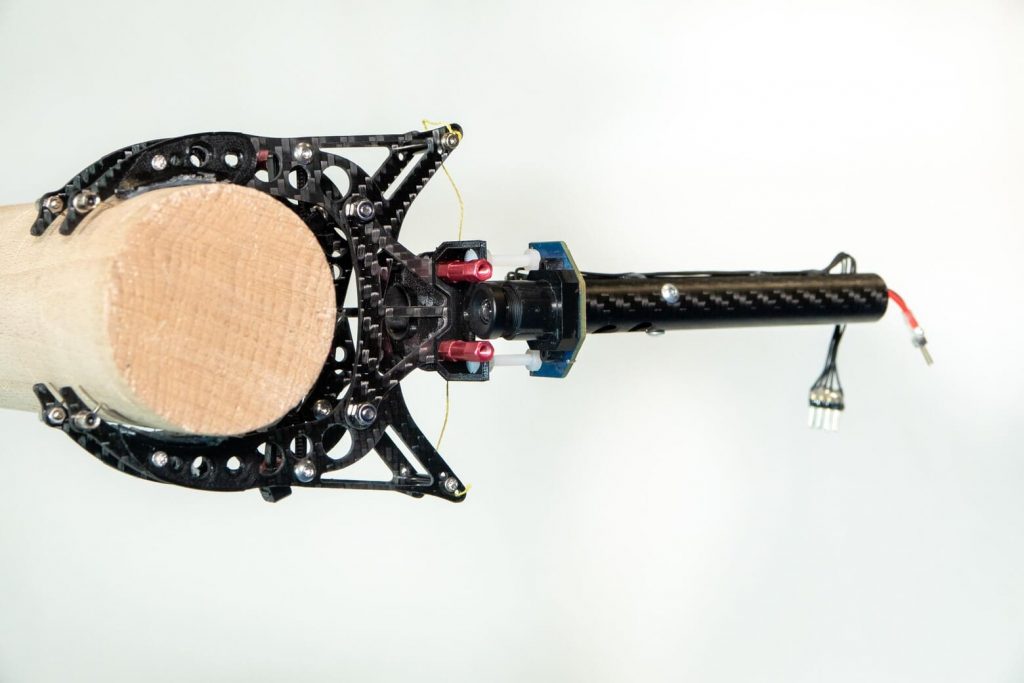
Сама клешня была разработана таким образом, чтобы поглощать импульс движения робота при ударе и быстро и надежно закрываться, чтобы выдержать его вес. Оказавшись на насесте, робот остается на насесте без затрат энергии. В настоящее время исследователи проводят летные испытания в лаборатории.
Как только орнитоптер научится самостоятельно приземляться на ветку дерева, он сможет выполнять определенные задачи, такие как ненавязчивый сбор биологических образцов или измерения с дерева. В конце концов, он может даже приземлиться на искусственные конструкции, что может открыть новые области применения.
Рафаэль Зуфферей, соавтор разработки
Читать далее:
Недалеко от Земли нашли две планеты. Возможно, они обитаемы
Уникальный метеор переписал историю Солнечной системы: откуда он прилетел
Прототип модуля новой МКС взорвали в центре НАСА. Посмотрите, как это было



