Исследователи создали роботизированную руку, которая не умеет двигать пальцами, но может захватывать и удерживать различные предметы.
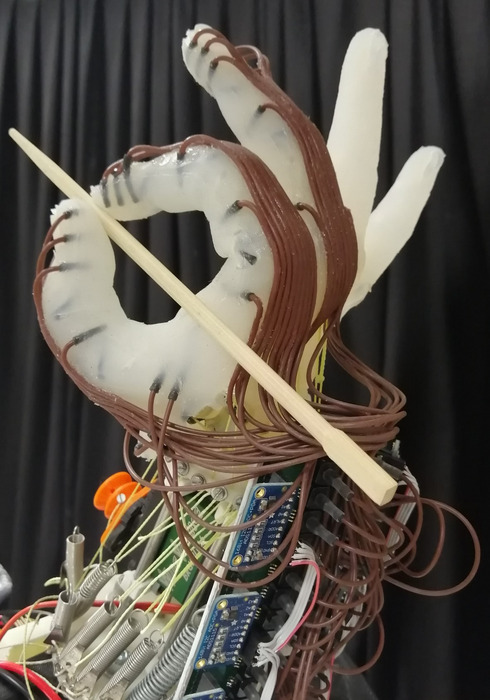
Инженеры из Кембриджского университета разработали мягкую роботизированную руку, напечатанную на 3D-принтере, которая не может самостоятельно двигать пальцами, но выполняет ряд сложных движений. Рука робота была обучена хватать разные предметы и могла предсказать, уронит ли она их, используя информацию, полученную от датчиков, размещенных на «коже».
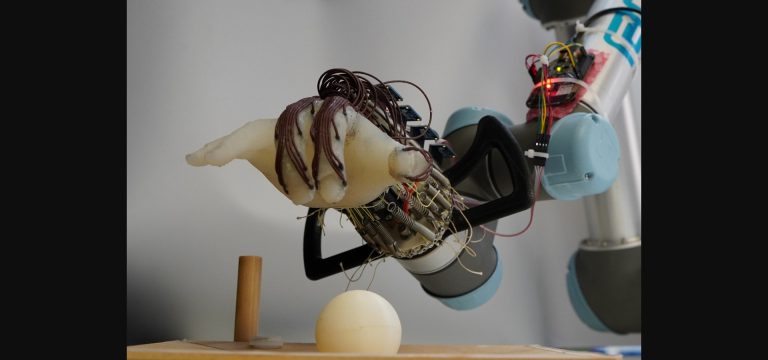
Исследователи использовали напечатанную на 3D-принтере антропоморфную руку с имплантированными тактильными датчиками, чтобы рука могла «чувствовать», к чему прикасается. Рука была способна только к пассивным движениям на основе запястья. «Большим преимуществом этой конструкции является диапазон движения, который мы можем получить без использования каких-либо приводов», — говорят авторы работы.
Ученые провели более 1 200 тестов с рукой робота, наблюдая за ее способностью захватывать мелкие предметы, не роняя их. Первоначально робот обучался с использованием небольших пластиковых шариков, напечатанных на 3D-принтере, и хватал их, используя заранее определенные действия, полученные в результате демонстрации людьми.
Робот использовал метод проб и ошибок, чтобы узнать, какой захват будет успешным. Закончив тренировку с мячами, он попытался схватить различные предметы, включая персик, компьютерную мышь и рулон пузырчатой пленки. В этих тестах рука смогла успешно схватить 11 из 14 предметов.
Захват предметов разного размера, формы и фактуры — задача, простая для человека, но сложная для робота. Большинство современных передовых роботов не способны выполнять манипуляционные задачи, с которыми с легкостью справляются маленькие дети. Например, люди инстинктивно знают, какую силу нужно приложить, чтобы поднять яйцо, но для робота это проблема: недостаточно крепкий захват приведет к падению предмета, слишком сильный — разобьет яйцо.
Сложные технологии с моторизированными пальцами требует значительного количества энергии и большого числа сложных и дорогих приводов для каждого сустава. Пассивный захват, предложенный инженерами, делает робота гораздо более простым в управлении и гораздо более энергоэффективным. Исследователи полагают, что их адаптируемая конструкция может быть использована при разработке недорогой робототехники, способной к более естественным движениям.
Читать далее:
Посмотрите на карту Марса с самым высоким разрешением: 110 000 кадров и 5,7 трлн пикселей
«Море» кварков внутри одного протона: из чего состоит элементарная частица
Новый снимок «Хаббла» озадачил ученых
На обложке: прототип роботизированного захвата. Изображение: University of Cambridge



