
С помощью космической технологии ученые создали четвероного робота, способного удерживать баланс в сложных условиях.
Инженеры из Института робототехники Университета Карнеги-Меллона разработали систему, которая делает стандартного четвероногого робота достаточно проворным, чтобы ходить по узкому бревну. Ученые использовали оборудование, которое применяется для управления спутниками в космосе, чтобы повысить способность устройства держать баланс.
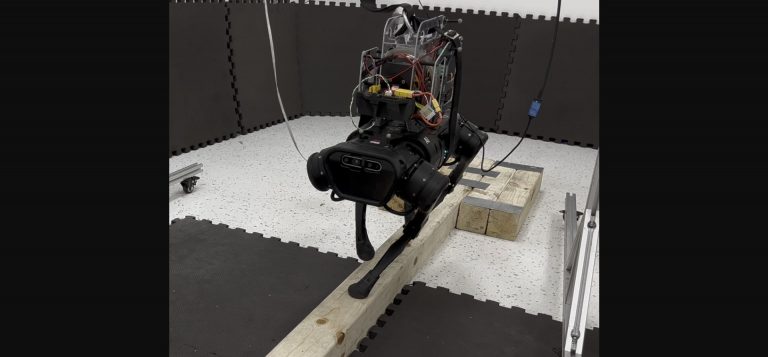
Для повышения стабильности ученые использовали систему привода реактивного колеса (RWA), которая крепится к задней части четвероногого робота. Эта техника управления позволяет роботу балансировать независимо от положения его ног. RWA широко используются в аэрокосмической отрасли для управления ориентацией спутников путем управления угловым моментом космического корабля.
По сути, у вас есть большой маховик с прикрепленным к нему двигателем. Если вы повернете тяжелый маховик в одну сторону, он заставит спутник вращаться в другую сторону. Теперь возьмите его и положите на тело четвероногого робота.
Закари Манчестер, доцент Университета Карнеги-Меллона и соавтор исследования
Команда протестировала систему в серии экспериментов, которые продемонстрировали повышенную способность робота восстанавливать баланс после внезапных ударов или падений. Робот успешно перемещался по узкому бревну шириной всего 6 см. Кроме того ученые имитировали классическую проблему падающего кота: они сбросили робота вверх ногами с высоты почти в полметра. RWA позволили роботу переориентироваться в воздухе и приземлиться на ноги.
Большинство современных четвероногих роботов состоят из туловища и четырех ног, каждая из которых заканчивается закругленной ступней, рассказывают инженеры. Это позволяет роботу перемещаться по плоским поверхностям и даже подниматься по лестнице. Такие роботы напоминают собак или гепардов, но в отличие от этих животных, которые могут использовать хвост для управления резкими поворотами, роботы плохо держат баланс.
Пока три ноги робота остаются в контакте с землей, он сохраняет стабильность. Но если только одна или две ноги находятся на земле, робот не может легко скорректировать свое положение и имеет гораздо более высокий риск падения. Отсутствие равновесия делает ходьбу по пересеченной местности особенно трудной. Повышение способности держать баланс позволит расширить возможности для применения роботов.
Читать далее:
Уже не игрушка. К чему приведет мир эволюция GPT и Midjourney
В космосе твой крик никто не услышит: 7 остросюжетных книг о тайнах Вселенной
«Море» кварков внутри одного протона: из чего состоит элементарная частица



