Группа исследователей под руководством инженеров из Калифорнийского университета в Сан-Диего разработала новый подход к управлению роборукой. С его помощью устройство может вращать различные предметы, основываясь только на «тактильных ощущениях».
Чтобы построить свою систему, исследователи прикрепили 16 сенсорных датчиков к ладони и пальцам четырехпалой роботизированной руки. Каждый датчик стоит около $12 и выполняет простую функцию: определяет, касается его объект или нет. Роботизированная система использует двоичные сигналы от совокупности таких распределенных по ладони датчиков, чтобы управлять вращением без вреда для предмета.

Инженеры обучили свою систему в симуляции виртуальной роботизированной руки, вращающей разнообразный набор объектов, в том числе неправильной формы. Моделирование показывало, в какие моменты предметы будут касаться датчиков, положения суставов в каждый момент времени и риск падения предмета. На основе этих данных ИИ сообщает роботизированной руке, какой сустав должен двигаться и в каком направлении в каждый момент времени.
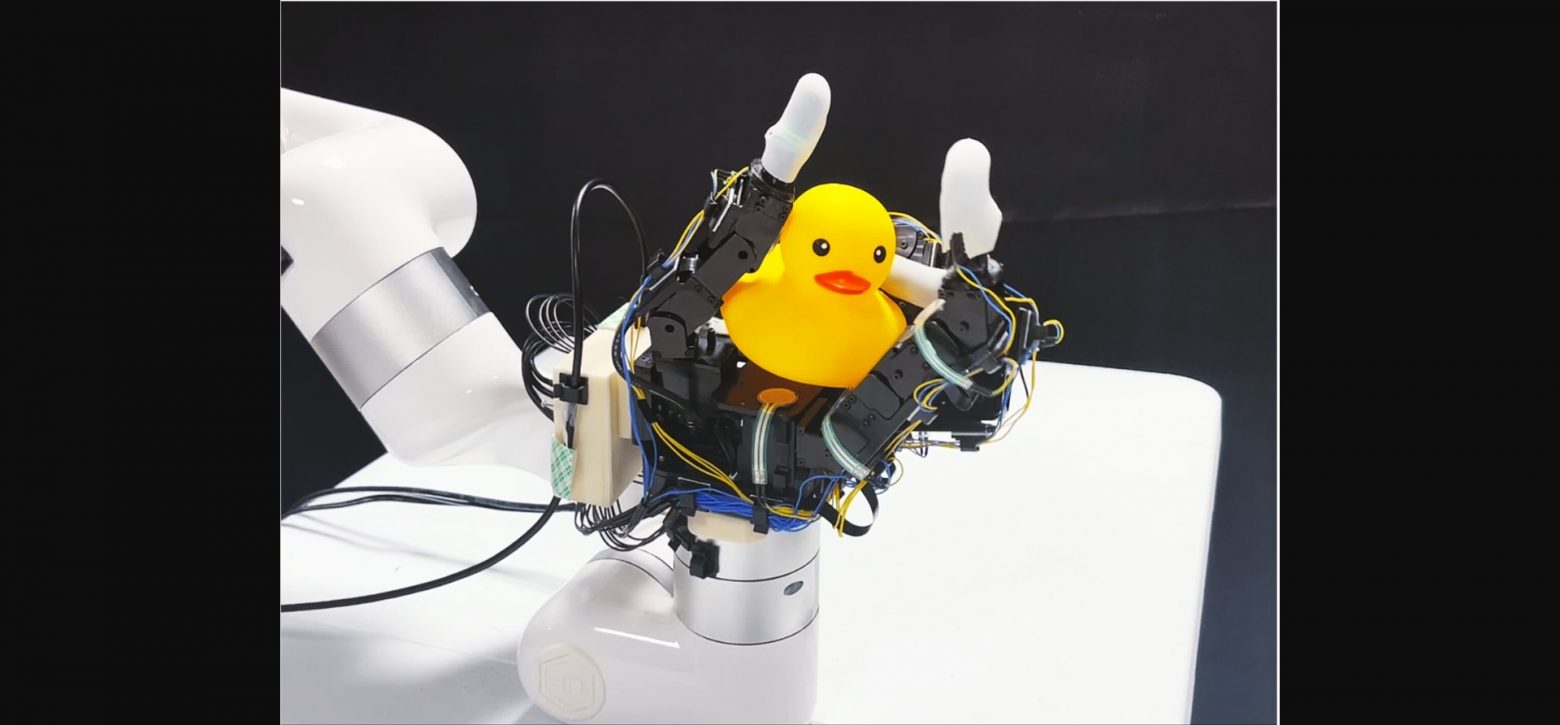
После обучения исследователи применили готовую систему управления к реальной роботизированной руке и протестировали ее способность вращать разные объекты, не повреждая их и не ослабляя захват. Среди предметов были помидор, перец, банка арахисового масла и игрушечная резиновая уточка, которая была самым сложным объектом из-за своей формы. Тесты подтвердили эффективность работы модели.
Большинство современных подходов к управлению роборукой опираются либо на компьютерное зрение, либо на дорогие сверхчувствительные датчики, сконцентрированные на кончиках пальцев, говорят авторы исследования. Новая технология представляет дешевую, но эффективную альтернативу.
Читать далее:
Мощным землетрясениям за несколько часов предшествуют незаметные движения Земли
«Уэбб» впервые обнаружил воду в области формирования планет земного типа
Физики «обстреляли» ядра гелия, чтобы понять его природу: что из этого вышло