

Команда проекта Surface Avatar объявила об успешных испытаниях дистанционного управления роботами с орбиты Земли.
Астронавт НАСА Фрэнк Рубио и исследователи Немецкого аэрокосмического центра провели эксперимент по дистанционному управлению роботами с МКС. Несколько роботов работали в полуавтономном режиме, астронавт корректировал их действия по мере необходимости. Эксперимент — часть проекта Surface Avatar, разрабатываемого для дистанционного управления роботами на Марсе и Луне.
Команда из трех роботов работала в условиях искусственного марсианского ландшафта, воссозданного в Немецком центре космических операций. Выполняя задачи тестового сценария, роботы должны были выполнить подготовительные работы перед прибытием на Марс людей.
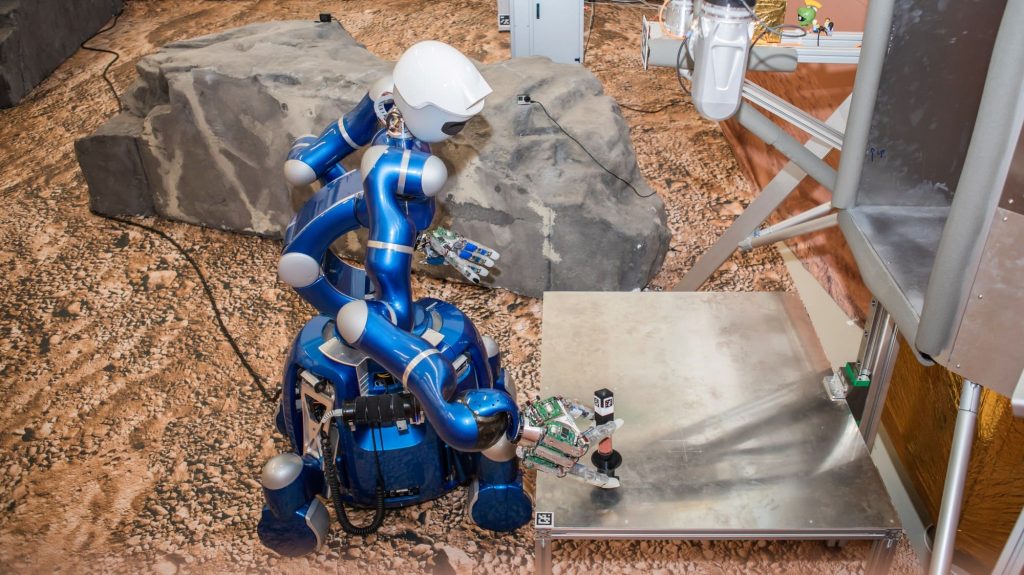
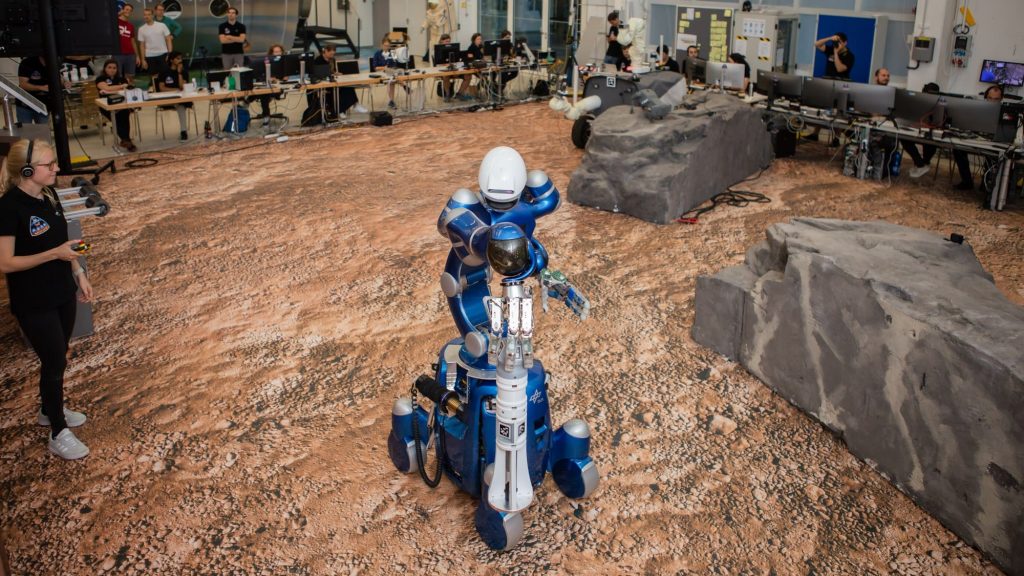
Астронавт с МКС контролировал и корректировал действия роботов. В его распоряжении был человекоподобный робот Rollin’ Justin, который разгрузил посадочный модуль и установил сейсмический датчик, а также Interact Rover для наблюдения за местностью и робот LAMA, предназначенный для научных исследований.
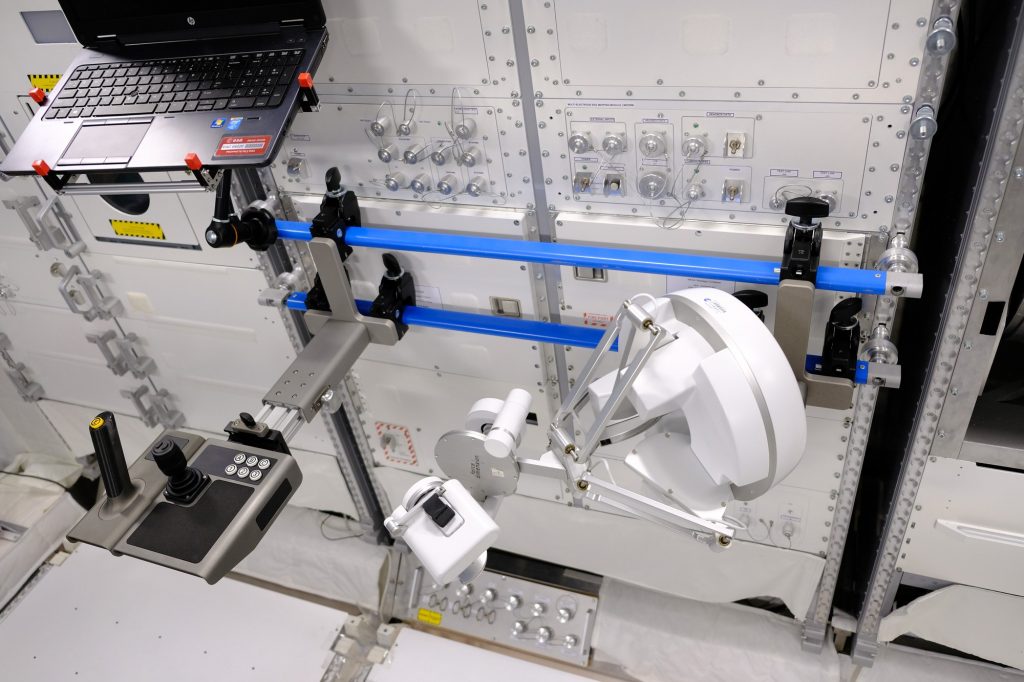
Рубио впервые протестировал контролер для управления автономностью роботов. Это устройство позволяет одним нажатием кнопки переводить устройства в режим ручного управления как аватаром или заставлять его действовать самостоятельно. На экране космонавта поступала информация, которую видел робот, а интерактивный джойстик с обратной связью позволял управлять роботом и «чувствовать» предметы в его руках. Все задачи эксперимента команда выполнила за два часа.

После успешной демонстрации исследователи проведут детальную оценку технологии, а также подготовят новые симуляции. Проект Surface Avatar предусматривает как минимум три эксперимента с интервалом примерно в шесть месяцев. Они будут становиться все более комплексными и сложными.
Цель состоит в том, чтобы реализовать и продемонстрировать использование интеллектуальных роботов, работающих вместе с астронавтами, и продолжать совершенствовать интерфейсы, чтобы использовать технологии в будущих пилотируемых миссиях на Луну, а затем и на Марс.
Алин Альбу-Шеффер, директор Института робототехники и мехатроники Немецкого аэрокосмического центра
Читать далее:
Распад суперконтинентов выносит алмазы на поверхность Земли
Анализ ДНК жителей Мачу-Пикчу показал, откуда появились жители Мачу-Пикчу
Мощным землетрясениям за несколько часов предшествуют незаметные движения Земли
На обложке: Дистанционно управляемый робот выполняет задачи миссии. Фото: DLR



