

Инженеры воссоздали сложное движение осьминога в роботизированном захвате.
Инженеры из Бейханского университета создали роботизированный захват, вдохновленный осьминогом. Устройство обеспечивает беспрецедентную гибкость и деформируемость при распознавании объектов и манипулировании ими как в ограниченном пространстве, так и под водой.
Благодаря ловкости и интеллекту осьминоги уже давно являются источником восхищения и вдохновения для ученых, работающих в области робототехники. «У них сотни мышц. Они могут контролировать так много мышц и так много степеней свободы», — говорит Ли Вэнь, соавтор исследования.
Ученых особенно заинтересовало движение «распространяющегося изгиба», которое осьминог использует, чтобы взмахнуть рукой и схватить добычу. Изгибающееся движение начинается у основания конечности и движется волной к кончику, который затем обволакивает рыбу или другое существо и прикрепляется к ней присосками, чтобы добыча не ускользнула.
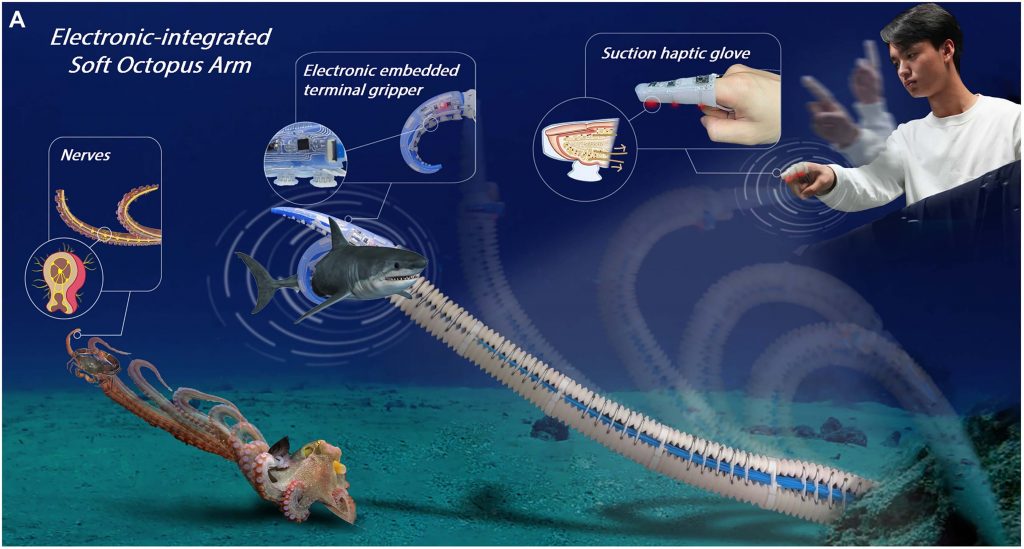
Чтобы имитировать это движение, исследователи математически смоделировали движение распространения изгиба. Роботизированное щупальце состоит из пяти сегментов из мягкого силикона со встроенными «проводами» из металла, который при комнатной температуре является жидким. Вместе со стандартными кремниевыми чипами они образуют электронную сеть, имитирующую нервную систему руки осьминога.
Кончик щупальца робота оснащен присосками и датчиками температуры. Вся система представляет собой автономный блок, управляемый по беспроводной сети с помощью «перчатки» на один палец, оснащенной датчиками, которые улавливают не только точное движение пальца оператора, но также наклон, крен и ускорение его кисти и руки, а также передают данные к щупальцу. Как и настоящая рука осьминога, октобот расширяется в 1,5 раза от своей первоначальной длины, достигая своей цели.
Читать далее:
ИИ разработал суперконденсатор, который хранит рекордное количество энергии
Оказалось, дешевый и популярный препарат помогает в лечении рака
Посмотрите на «сердце» Млечного Пути на снимках телескопа «Джеймс Уэбб»
На обложке: Изображение от vecstock на Freepik



