
Инженеры из Германии и Венгрии разработали систему виртуальной реальности, чтобы расшифровать алгоритмы коллективного движения рыб и применить их для управления роями роботизированных машин.
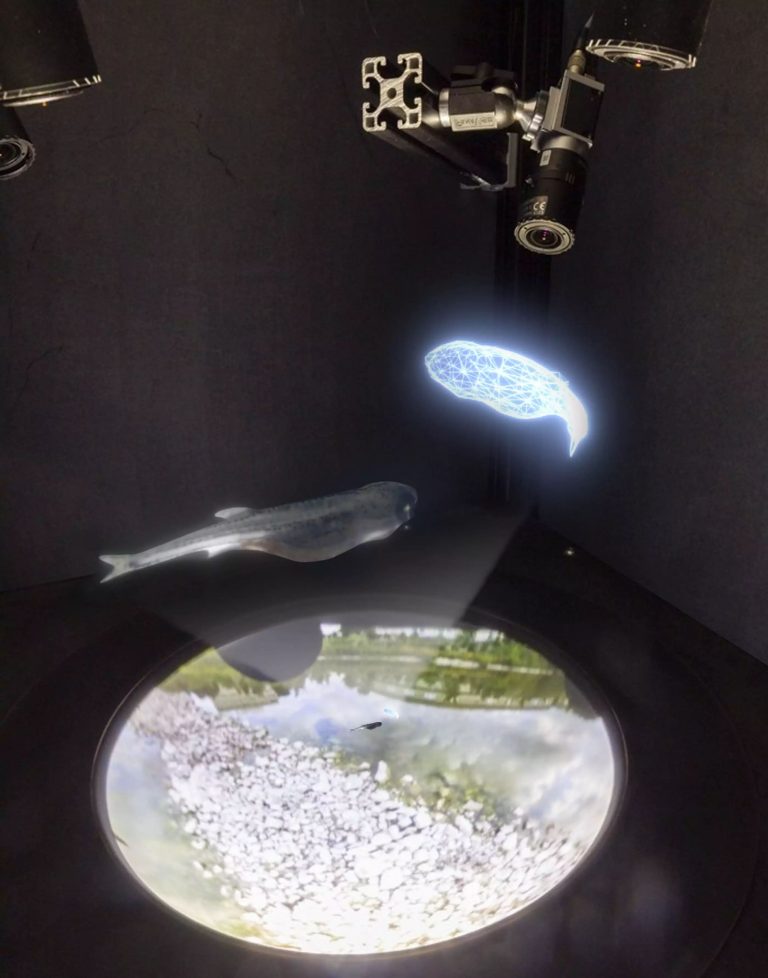
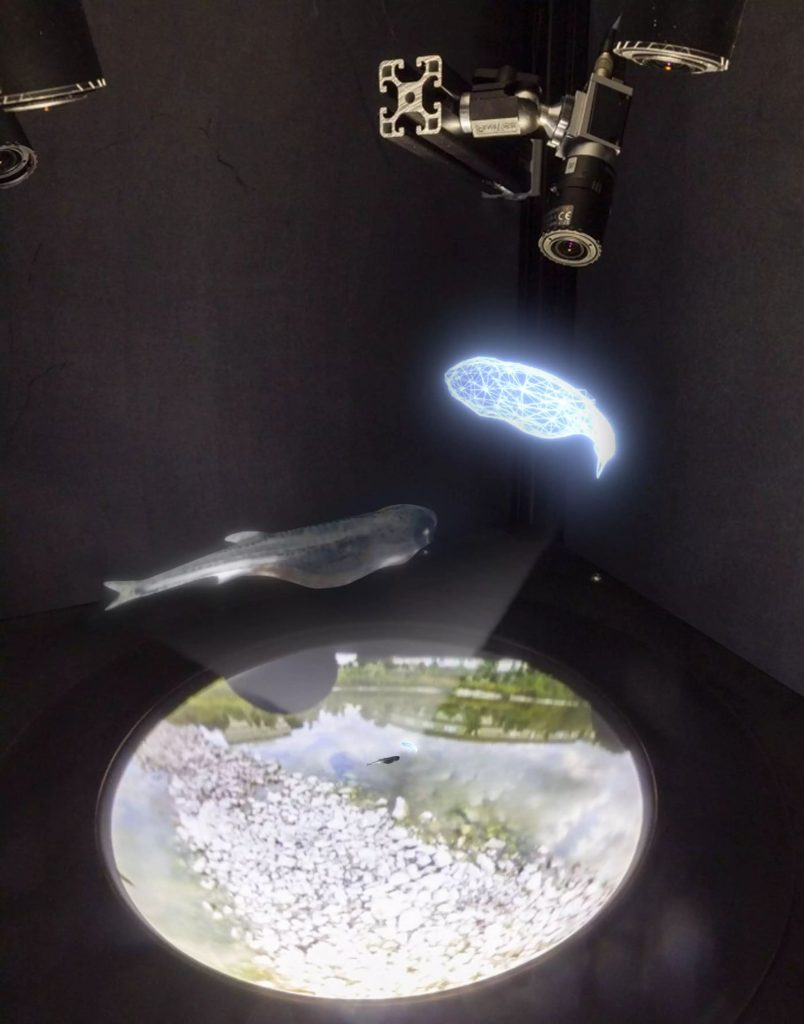
Исследователи из Университета Констанца и Института поведения животных Общества Макса Планка создали VR-систему, в которой рыбки данио-рерио взаимодействуют с виртуальными «голографическими» сородичами. Это позволило изучить принципы, с помощью которых рыбы координируют свои движения в косяке без центрального лидера, избегая столкновений и гибко реагируя на изменения окружающей среды.
Оказалось, рыбы используют удивительно простой алгоритм для координации движений, основанный только на воспринимаемом положении соседей, а не на их скорости.
Для проверки реалистичности обнаруженного «закона управления» исследователи провели водный тест Тьюринга, в котором настоящая рыба взаимодействовала с виртуальной, управляемой либо записью движений реальной рыбы, либо разработанным алгоритмом. Интересно, что настоящие рыбы не смогли отличить алгоритмическую модель от реального сородича.
Исследователи использовали «природный закон» движения в группе для управления роботизированными автомобилями, воздушными и водными беспилотными дронами. Результаты показали, что алгоритм обеспечивал производительность, сравнимую с передовыми методами управления автономными машинами, но требовал гораздо меньше вычислений.
Эта работа подчеркивает взаимосвязь между робототехникой и биологией — использование робототехники для исследования биологических механизмов, что, в свою очередь, может вдохновить на создание новых и эффективных стратегий управления роботами.
Оливер Дойссен, профессор компьютерных наук в Университете Констанца
Читать далее:
Женщина ушла от мужа к ChatGPT после 20 лет брака: «Он удовлетворяет меня лучше, чем человек»
Оружие будущего: Япония запустила снаряды из рельсотрона со скоростью 8000 км/ч
Назван неожиданный напиток, который может снизить риск остановки сердца



