
Диэлектрические эластомеры — это упругие непроводящие мембраны, реагирующие на электрические поля. Будучи зажатыми между двумя электродами, они увеличиваются в размерах на несколько сотен процентов в двухмерном пространстве. Эти свойства обусловили создание мягких роботов и сенсоров. Однако, меняющие форму мембраны трудно оптимизировать для длительного использования.
Кейт Чунчань Фу из института A*STAR и его команда использовали метод компьютерной симуляции для улучшения диэлектрических эластомеров. Они обратились к анализу конечных элементов, который предсказывает производительность сложных объектов, моделируя их в виду маленьких взаимосвязанных геометрических фигур. Но найти алгоритмы, отражающие поведение умных полимеров, не просто, пишет Phys.org

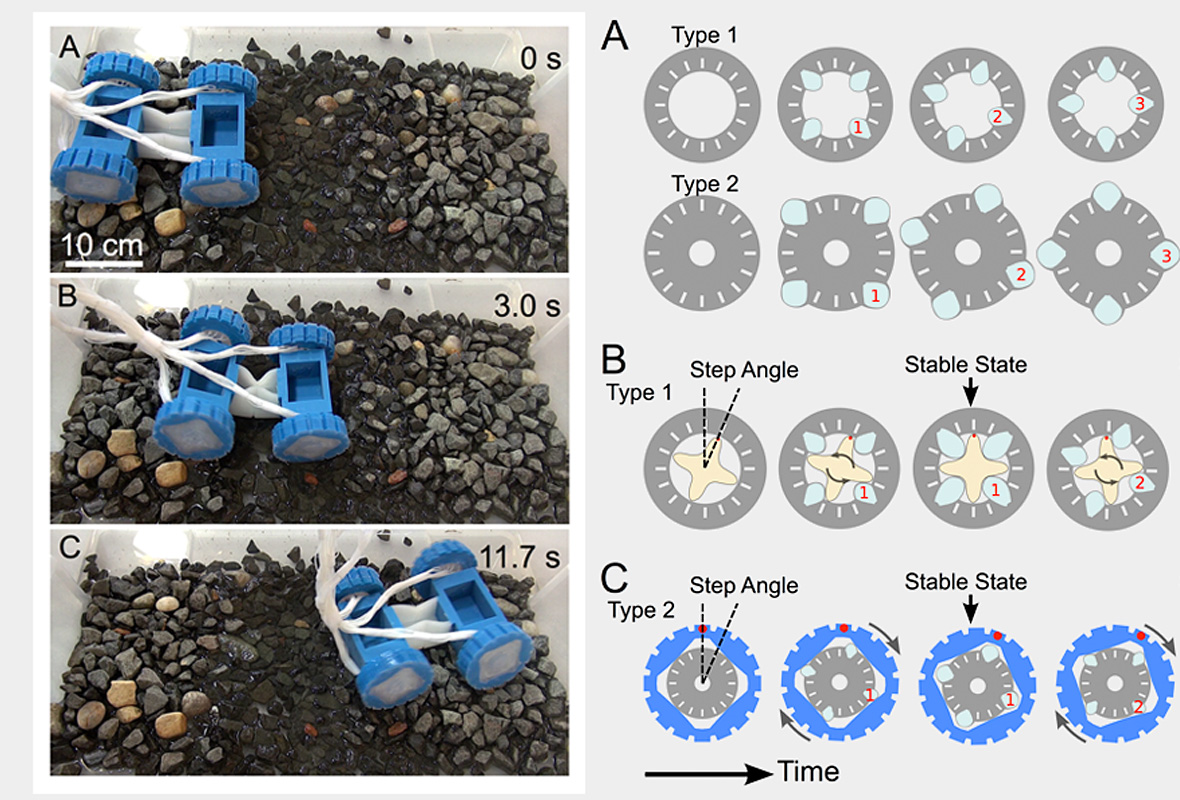
Робот-амфибия с мягким мотором не боится экстремальных условий
Идеи
«Существующая программа конечных элементов не обладает способностью к симуляции мягких эластичных материалов, реагирующих на электричество и вызывающих серьезные деформации, — говорит Фу. — Плюс, большинство симуляций этих полимеров происходило с помощью „внутренних“ программ, то есть недоступных для научного сообщества».
Эту проблему ученые решили с помощью модели, раскрывшей, как повторные движения воздействуют на способность мембраны реагировать на электрическое и механическое воздействие. Алгоритм связал это свойство, известное как вязкоупругость, с электрическими зарядами в устройстве. И внесли эту модель в программу, сделав ее доступной для всех исследователей.
По мнению Фу, инструмент симуляции оказался весьма полезным для проведения экспериментов в области создания мягких роботов.