
Разработчики натренировали алгоритм на 24 500 кадрах с действиями собак от первого лица. С помощью видероликов искусственный интеллект смотрел на манеру движений собак, их ходьбы и других действий. После множества повторений алгоритм научился предсказывать траекторию движения собаки и ее цель на пять кадров вперед.

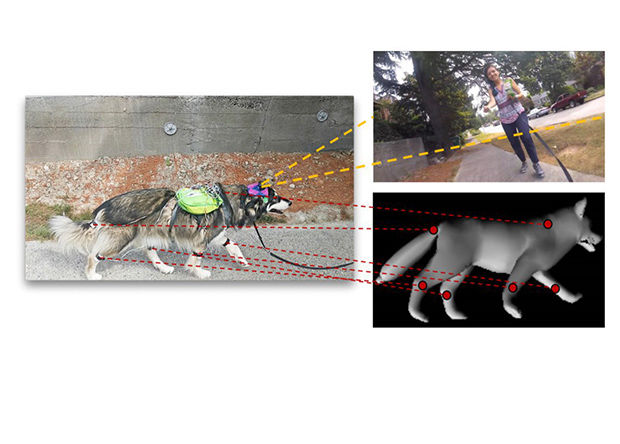
При этом нейросеть состоит из трех алгоритмов — одна анализирует предыдущие действия собаки, предполагая ее дальнейшие шаги. Вторая занимается планированием движений — анализирует ближайшие к друг другу кадры для фиксации местоположения питомца, третья — классифицирует объекты и занимается распознаванием безопасных для собаки зон.
В будущем алгоритм можно протестировать на данных разных собак и других животных, а также с других датчиков. В широком рынке алгоритм будет использоваться не в ближайшие годы.