На сегодняшний день разработчикам роботов практически не удавалось создать устройство, которое может одновременно захватывать как хрупкие предметы, так и тяжелые. Инженеры из MIT представили технику захвата, работающую по принципу мухоловки Венеры, которая позволит избавиться от этого недостатка.
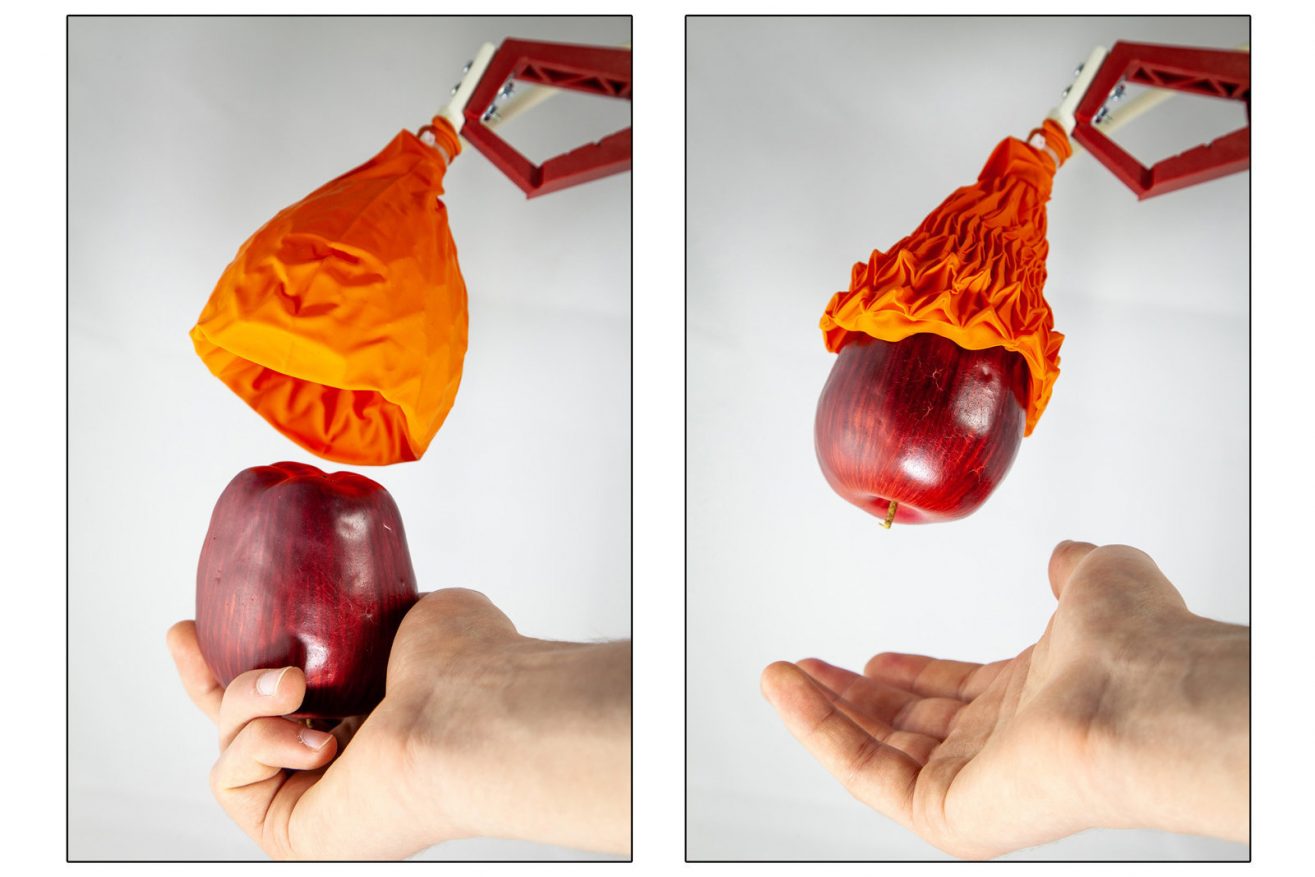
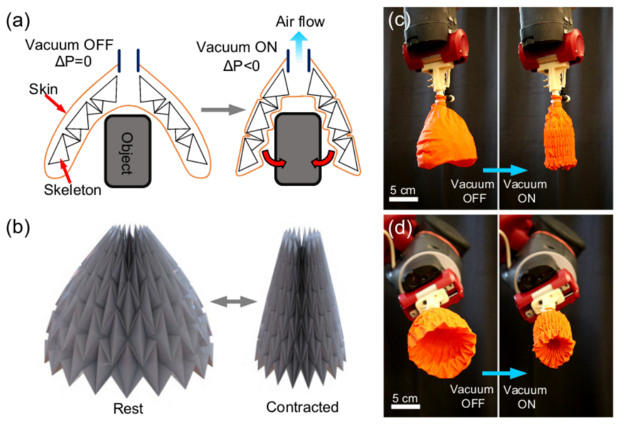
Для создания необходимой формы инженеры собрали оригами из напечатанных на 3D-принтере деталей из пластика, которые складываются при высоких температурах. Это позволяет эффективно адаптироваться по форме вещи, которую робот захватывает, не угрожая ей разрушением. Вакуумное пространство внутри устройства позволяет удерживать предмет на месте, воздухонепроницаемая оболочка из ткани или резинового баллона обеспечивает лучшую поверхность захвата.

Однако у такого метода есть и свои минусы. Такая форма лучше всего подходит для захвата круглых предметов, таких как фрукты или бутылки с вином, и, предпочтительно, твердых предметов. Однако устройство не сможет захватить плоские предметы, а также вещи с отверстиями.

Инженеры надеются, что эту технологию в дальнейшем можно использовать при создании медицинских роботов, которым необходимо работать с вещами разной плотности и хрупкости.