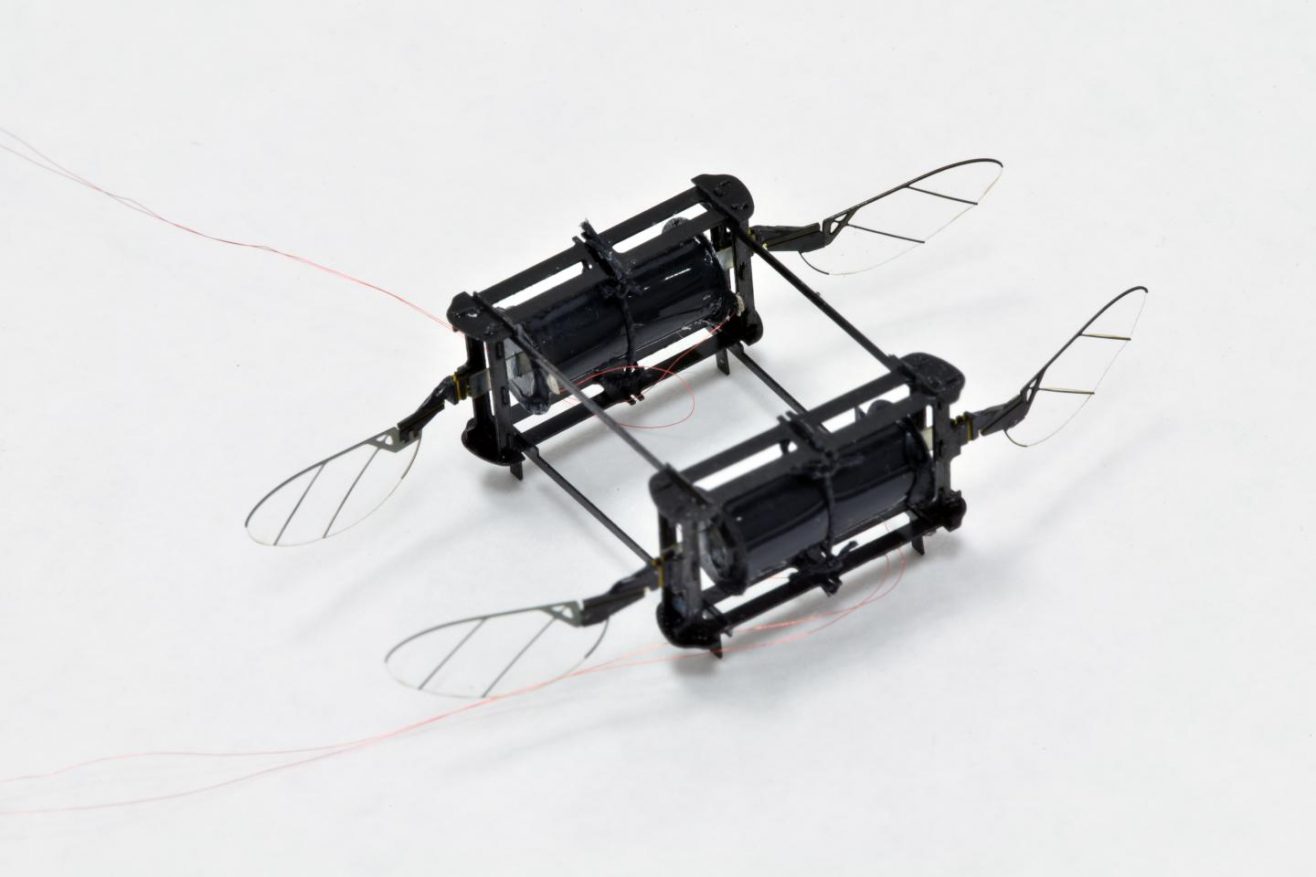
Двигательная система робота состоит из мягких электрических приводов, изготовленных на основе диэлектрических эластомеров — мягких материалов с хорошими изоляционными свойствами, которые деформируются при воздействии электрического поля.
Электроды обладают высокой проводимостью — в ходе тестирования исследователям удалось управлять ими на частоте 500 Гц, наравне с жесткими приводами, которые ранее использовались в аналогичных роботах.
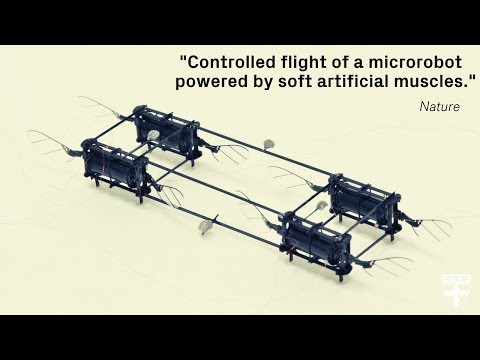
Чтобы продемонстрировать различные летные возможности, исследователи создали несколько разных моделей RoboBee с программным управлением.
Модель с двумя крыльями могла взлетать с земли, но после этого инженеры теряли над ней контроль. А концепт с четырьмя крыльями смог летать в течение нескольких минут, пережил многочисленные столкновения с предметами и благополучно приземлился в указанном месте.
Одним из преимуществ небольших роботов является их устойчивость к внешним воздействиям. Мягкий привод обеспечивает дополнительное преимущество, потому что он может поглощать удар лучше, чем традиционные двигательные системы. Это может пригодиться, например, при пролете через завалы при поисково-спасательных операциях.
Элизабет Фаррелл Хелблинг, ведущий автор исследования
Ранее инженеры из Школы промышленной инженерии Пердью разработали новый класс роботов, которые могут использовать накопленную энергию для моментального ускорения своего липкого языка по аналогии с хамелеонами, саламандрами и жабами. Они могут воссоздавать эти биоинспирированные мощные и высокоскоростные движения с использованием накопленной упругой энергии.