Один из факторов, ограничивающих современные роботизированные манипуляционные системы, — это проблема с определением контактности сил. В качестве шага к улучшению роботизированных манипуляций мы представляем DIGIT — недорогой, компактный, тактильный датчик высокого разрешения, предназначенный для улучшения процесса манипуляции роборукой.
Цитата из научной статьи
Датчик, разработанный командой исследователей в Facebook, работает на основе сенсорных технологий, разработанных в прошлом. Датчик имеет небольшой размер и может быть установлен на роборуке с несколькими пальцами.
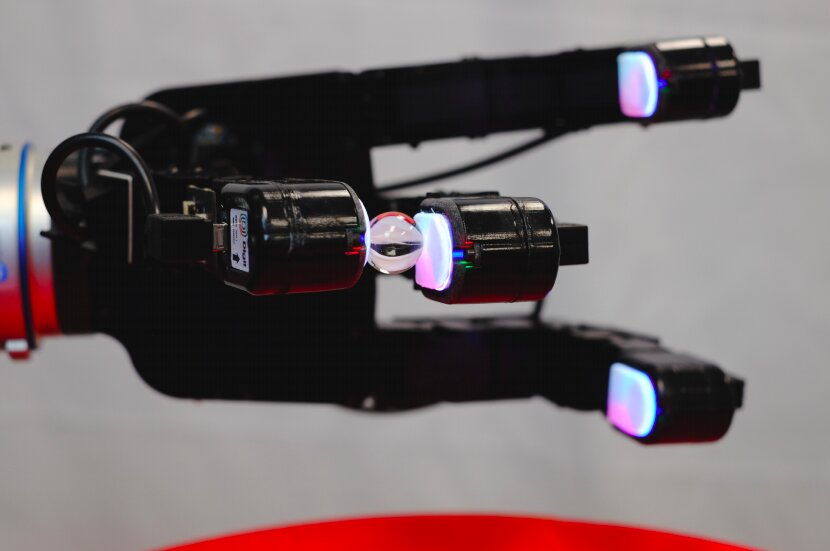
Для того, чтобы оценить производительность DIGIT, исследователи применили по датчику к каждому из пальцев на роборуке Allegro — это многопальцевая рука, разработанная Simlab, которая часто используется для тестирования новых методов манипулирования объектами. Во время эксперимента команда обучила нейросетевую модель действовать как контроллер для руки Allegro: роборука перемещала стеклянные шарики.
В этих тестах сенсор работал хорошо, он собрал тактильные данные высокого разрешения, которые можно было бы использовать для обучения глубоких нейронных сетей, чтобы лучше управлять рукой Allegro.
В будущем исследователи планируют продолжить работу над датчиком, они хотят сделать его размер еще меньше, а также включить в него изогнутые всенаправленные чувствительные поля.
Читать также
Выяснилось, что заставило цивилизацию майя покинуть свои города
Ученые раскрыли план герпеса по заражению человека: он похож на игру cо ставками
На 3 день болезни большинство больных COVID-19 теряют обоняние и часто страдают насморком