Американские исследователи с кафедры аэронавтики и космонавтики Массачусетского технологического института разработали модель, благодаря которой роботы смогут осознавать все, что происходит вокруг, как это делают люди. Информация об этом опубликована на сайте учебного заведения.
Группа исследователей представила модель пространственного восприятия: 3D Dynamic Scene Graphs. Разработка позволяет роботу быстро создавать 3D-карту своего окружения, в частности все окружающее его разделяется объекты и их местоположение в пространстве, например, кровать напротив шкафа.
Кроме создания обычной карты, новая модель может может позволить роботу запрашивать местоположение объектов и помещений или движение людей на своем пути.
По словам одного из доцентов кафедры, новая модель поможет роботу быстро принимать решения и планировать свое движение. Это похоже на то, как мы выстраиваем свой маршрут.
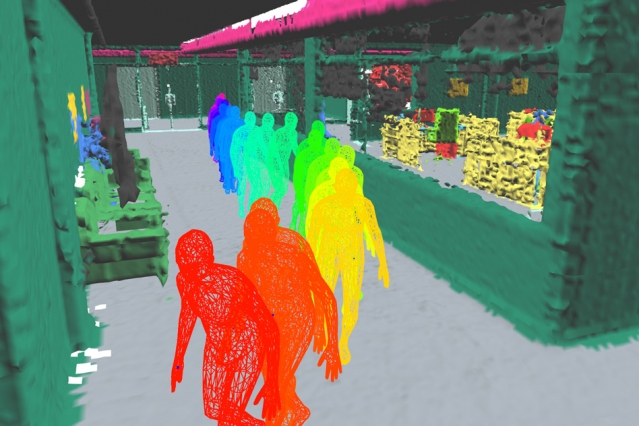
Для того, чтобы построить модель окружающей среды, модель основывается на работе с Kimera, это библиотека с открытым исходным кодом. Во время работы Kimera работает, принимая потоки изображений с камеры робота, а также инерциальные измерения с бортовых датчиков, чтобы оценить траекторию робота или камеры и реконструировать сцену в виде трехмерной сетки. Все это происходит в режиме реального времени.
В результате получается примерная карта пространства в виде трехмерной сетки, где все имеет цветовую кодировку как объекты, структуры и люди.
Новая разработка будет полезна не только для обычных бытовых задач, где нужно осознание координат, но также технология будет применима на производстве или для того, чтобы исследовать место, где произошла катастрофа.
Читать также:
Посмотрите на огромную «стену» из сотни тысяч галактик позади Млечного пути
Комета NEOWISE видна в России. Где ее увидеть, куда смотреть и как сделать фото
Выяснилось, что заставило цивилизацию майя покинуть свои города



