Недавно ученые провели исследование, направленное на воспроизведение человеческой способности определять объекты по тактильным ощущениям. Ее воспроизвели в роботах: теперь они могут понимать, где находятся объекты, просто прикоснувшись к ним.
В статье подчеркиваются преимущества разработки роботов, которые могут взаимодействовать с окружающей средой с помощью прикосновения, а не только через зрение и обработку звука.

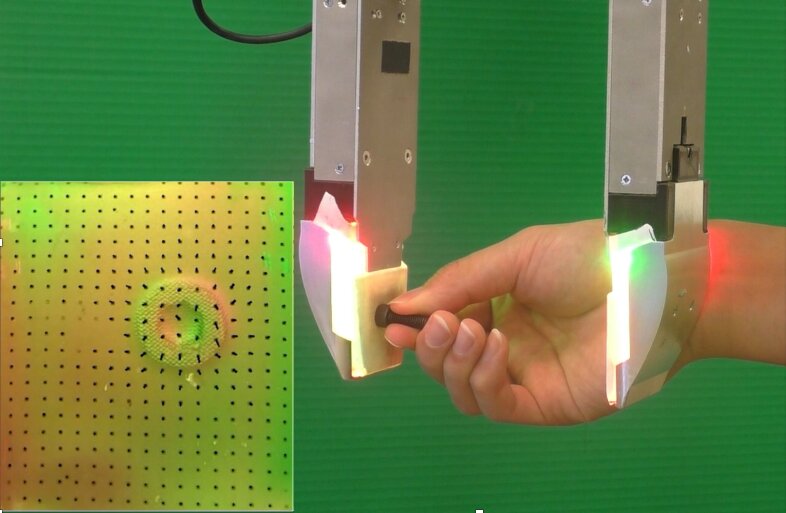
Целью нашей работы было продемонстрировать, что с помощью тактильного зондирования с высоким разрешением можно точно локализовать известные объекты даже с первого контакта. Это важный шаг вперед по сравнению с предыдущими работами по тактильной локализации, поскольку мы не полагаемся на какие-либо другие способы внешнего восприятия (например, зрение) или ранее собранные тактильные данные, связанные с управляемыми объектами.
Мария Бауза, одна из исследователей
Новая методика обучается на моделировании и не требует обширного сбора данных. Изначально исследователи разработали структуру, которая имитирует контакты между заданным объектом и тактильным датчиком, при условии, что робот будет иметь доступ к данным об объекте, с которым он взаимодействует (например, о его трехмерной форме, свойствах и т. д.).
Далее исследователи использовали современные методы машинного обучения для компьютерного зрения и обучения репрезентации, чтобы сопоставить реальные тактильные наблюдения, собранные роботом, с набором контактов, созданным в процессе моделирования.
По сути, метод, разработанный этой группой исследователей, может моделировать контактную информацию просто на основе трехмерной формы объекта. В результате не требуется никаких предварительных тактильных данных, собранных при тщательном изучении объекта. Это позволяет методике генерировать оценки позы для объекта с первого прикосновения тактильных датчиков робота.
Читать далее
Земля достигнет критической отметки температуры через 20 лет
Аборты и наука: что будет с детьми, которых родят
Названо растение, которому не страшно изменение климата. Им питается миллиард человек