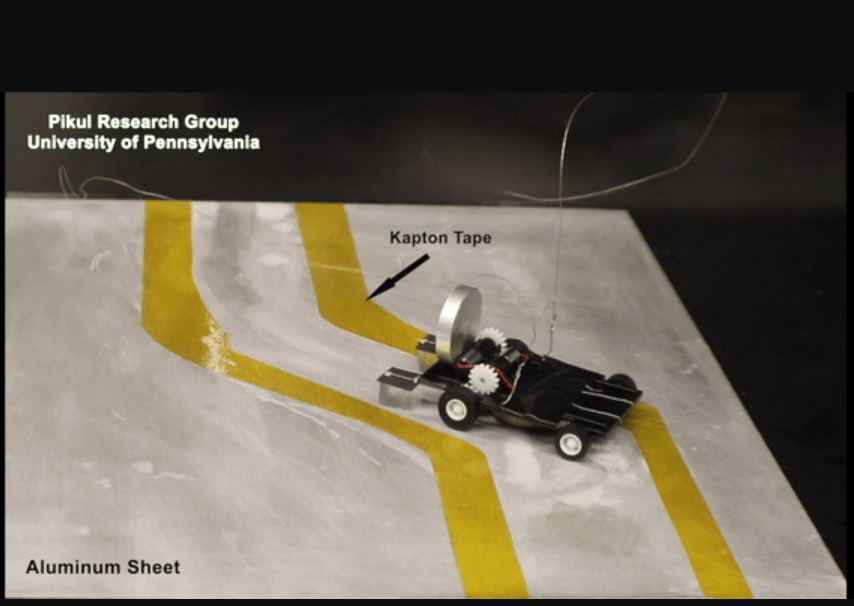
Авторы новой работы создали робота на колесах, который может ориентироваться в окружающей среде без компьютера.
Это в каком-то роде рудиментарная форма навигации, которая заточена под поиск источника энергии: робот автоматически направляется к металлическим поверхностям.
Если менять пространство вокруг робота по определенному алгоритмы его движения, то можно выполнять различные логические операции, основанные на наличии или отсутствии его источника питания.
Понимая типы сигналов, которые улавливает робот, исследователи могут разработать различные способы включения их в конструкцию робота для достижения желаемого типа навигации.


Читать далее:
Самое штормовое место на Земле: почему пролив Дрейка — опаснейший путь в Антарктику
Новое урановое соединение побило рекорд аномальной проводимости
Ошибка эволюции: какие органы в организме человека работают нелогично