Технология, разработанная исследователями из Кембриджского университета, Оксфордского университета и Университетского колледжа Лондона (UCL), основана на лидаре — это технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления поглощения и рассеяния света в оптически прозрачных средах.
На основе данных лидара для создаются голографические изображения дорожных объектов сверхвысокой четкости, которые видит водитель.
Согласно данным, собранным с улиц в центре Лондона, голографические изображения появляются в поле зрения водителя в соответствии с их фактическим положением, так они создают дополненную реальность. Это может быть особенно полезно, когда такие объекты, как дорожные знаки, скрыты за деревьями или грузовиками. Новая разработка позволяет видеть буквально сквозь препятствия.
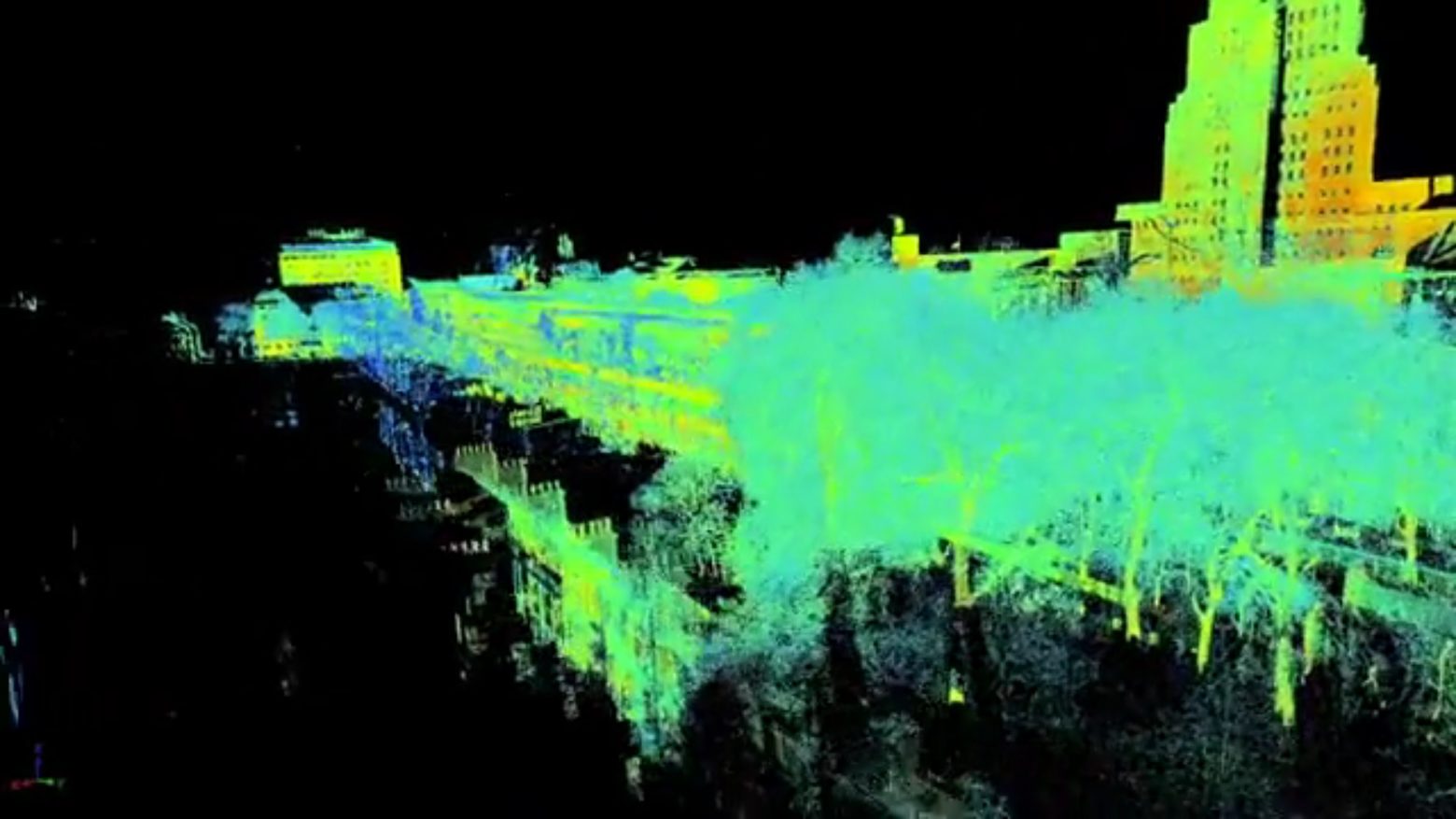
Используя лидар, исследователи сканировали Малет-стрит, оживленную улицу в центре Лондона. Миллионы импульсов были посланы с нескольких позиций вдоль улицы Мале. Затем данные лидара были объединены с данными облака точек, в результате получилась 3D-модель.
В будущем исследователи надеются усовершенствовать свою систему, персонализировав расположение головных дисплеев.