

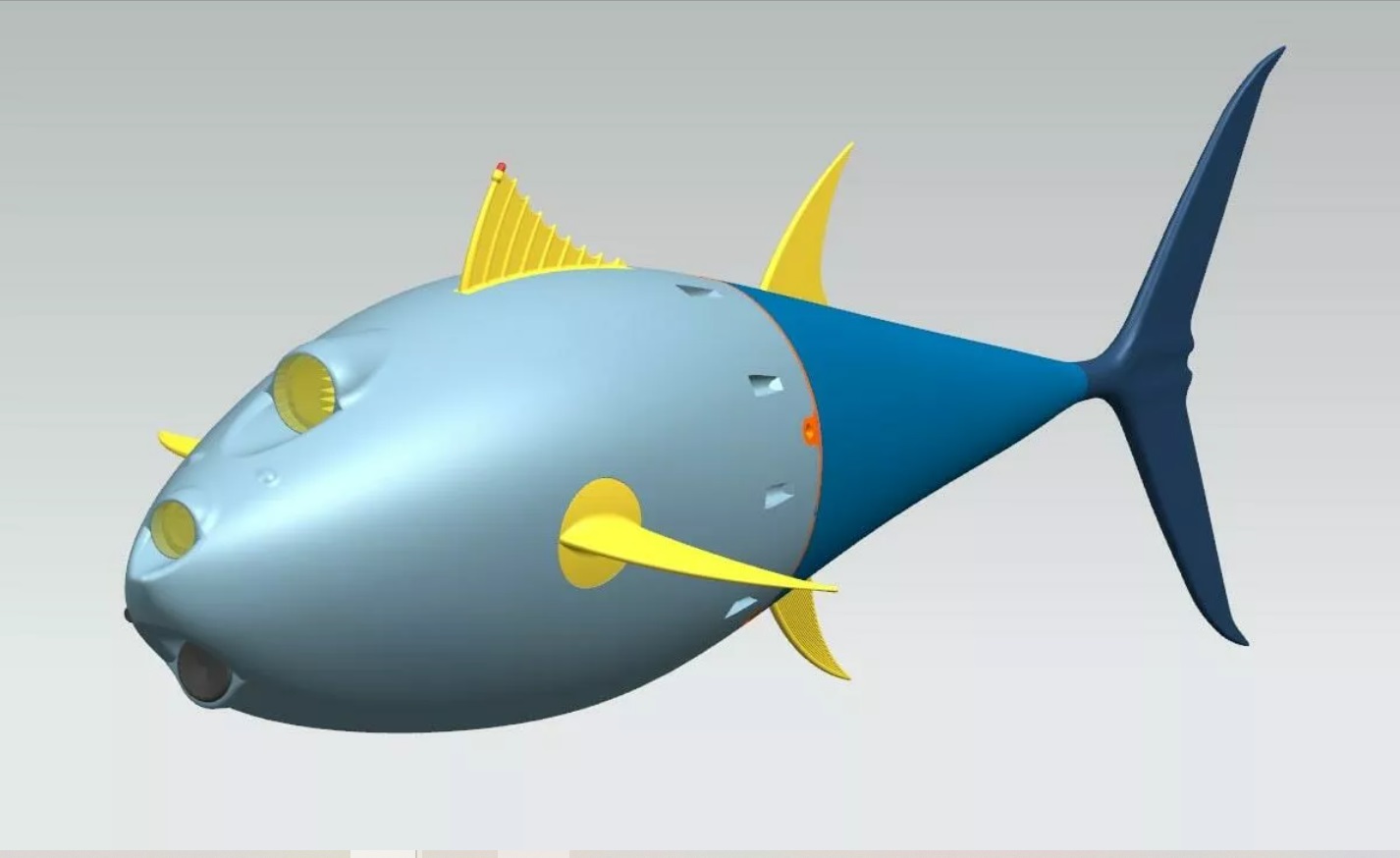
Сотрудники Центра нейротехнологий и машинного обучения Балтийского федерального университета (БФУ) создали первого в России биоморфного подводного робота.
Ученые показали макет подводного биоморфного робота-тунца, его основная цель: управлять движением косяков рыб в случае экологической катастрофы. Разработка воспроизводит принципы движения, навигации и взаимодействия с живыми организмами в естественной среде, как это задумано самой природой.
Также ученые уделили внимание созданию ИИ для робота: это нужно, чтобы принимать самостоятельные решения, ведь под водой нет системы GPS.
Разработать любой аппаратно-программный комплекс, будь то самокат или самолет, достаточно сложно. В нашем же случае, эта задача уже решена самой природой, в том числе с точки зрения энергопотребления и функционала. Нам нужно всего лишь правильно скопировать алгоритм — создать цифровой двойник живого организма. Но насколько трудоемко создавать абсолютные копии, не зная исходного кода! Например, мы знаем, что рыба плывет так, а не иначе, чтобы минимизировать потерю своей энергии. Но как она пользуется при этом ресурсами своего организма? Вот что нам предстоит узнать.
Виктор Казанцев, ведущий научный сотрудник Центра нейротехнологий и машинного обучения БФУ
С одной стороны разработка такого робота поможет ученым расширить фундаментальные знания, изучить механику передвижения живых организмов, принципы оптимизации энергопотребления, системы принятия решений и т. д. А с другой стороны, позволит проводить экологический мониторинг, управлять биоресурсами и сопровождать конкретные объекты под водой.
Показанный учеными БФУ ходовой макет робота-тунца уже может самостоятельно двигаться не только по прямой траектории, но и поворачивать.
Читать далее
Рассекречены разговоры погибшего экипажа «Союз-11»: о чем они говорили перед смертью
В Австралии нашли жуков, которые ходят по внутренней поверхности воды вверх ногами
Исследование: до вымирания динозавров их популяция резко сократилась



