
Следующий год в Республике Татарстан объявлен годом цифровизации. В честь этого Университет Иннополис опубликовал в Instagram-аккаунте видео с танцующей робособакой. Специалисты ИТ-вуза разрабатывают ПО для этого робота китайского производства.
В будущем разработчики планируют применять робособак для решения задач автономной инспекции промышленных объектов, строек, опасных объектов, в спасательных операциях, а также в роли экскурсовода и собаки-поводыря.
«Робот китайского производителя в базовой комплектации умеет ходить со скоростью 3 м/с, подниматься на задние лапы, делать сальто по команде с пульта. Все эти алгоритмы реализованы производителем, но исходный код закрыт. Собака „из коробки“ была без возможностей автономной ходьбы», — рассказывает старший научный сотрудник Лаборатории робототехники Университета Иннополис Рамиль Хусаинов.
Разработчики отмечают, что четырехногий робот — сложная комплексная система, включающая приводы, датчики, камеры, вычислительные схемы. Разработка системы управления таким роботом — нетривиальная задача со своими проблемами. У такой механической собаки есть ограничения по мобильности из-за её геометрии и используемых алгоритмов: робот пока не может ходить по поверхностям со сложным рельефом, быстро подниматься по лестнице и перепрыгивать препятствия. Время работы аккумуляторов — 20–30 минут, а грузоподъемность — до 5 кг.
Робототехники Университета Иннополис нацелены на реализацию собственного кода, обеспечивающего автономное перемещение робота в помещении, в том числе преодоление препятствий в виде лестниц, порогов и других трудно преодолимых робопсом препятствий.
Параллельно с этим проектом в Лаборатории робототехники студенты ИТ-вуза разработали собственную робособаку в рамках дипломной работы. Илья Севостьянов и Владимир Антипов сами сконструировали и распечатали на 3D-принтере корпус робота, сделали датчики, контроллеры и вычислительный блок. Моторы купил университет.

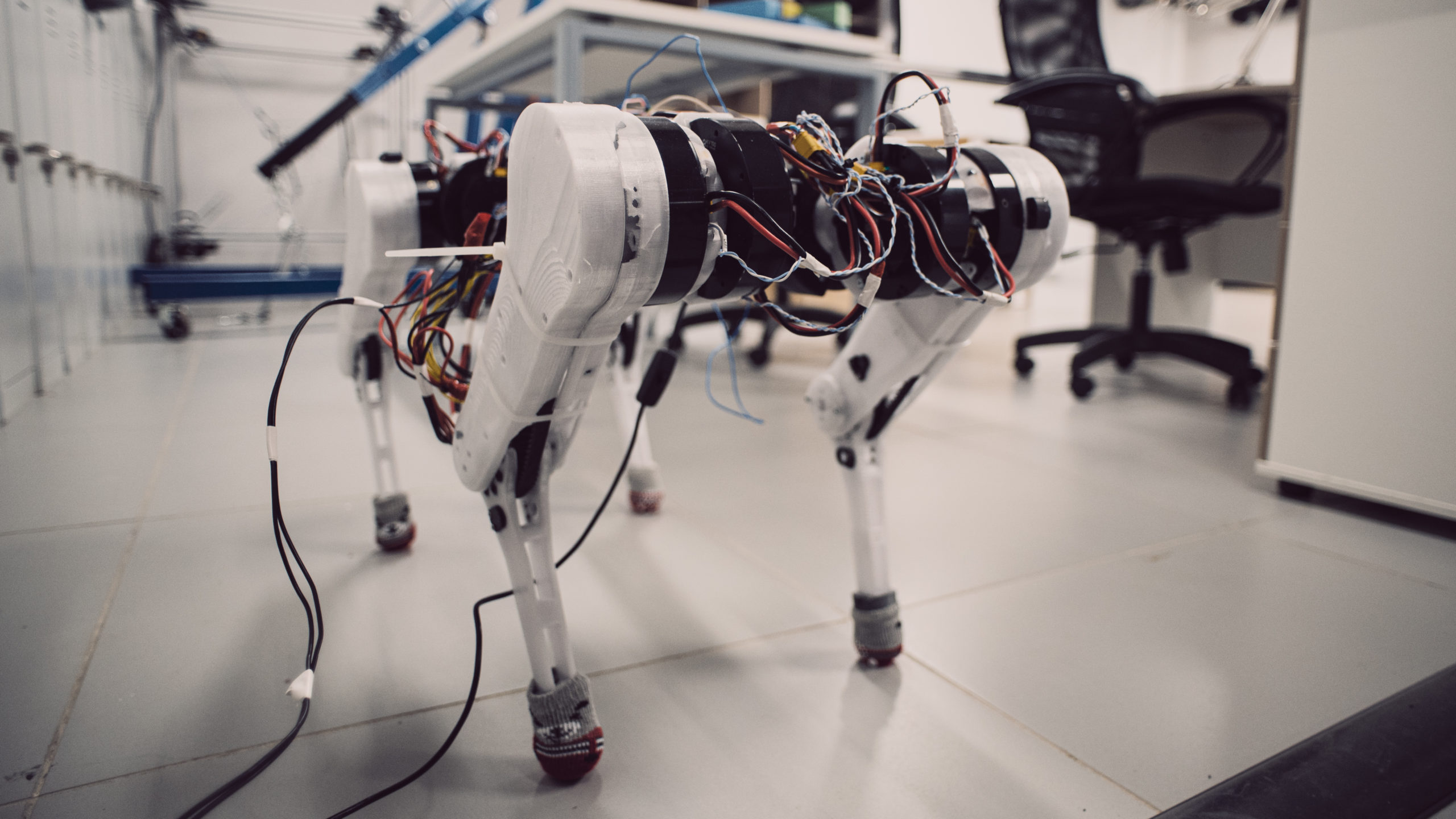
«Наша собака готова по механике, но у нее отсутствуют некоторые сенсоры, необходимые для передвижения. Студенты научили ее вилять хвостом. Зарубежный опыт подсказывает, что необходимо несколько итераций до появления качественной робототехнической платформы», — подытожил Рамиль Хусаинов.
Читать далее
В американской пустыне вылупились «живые ископаемые». Они спали десятки лет