Робот может не только двигаться, но и манипулировать предметами. По словам авторов, сегодня растет спрос на гибких роботов, которые легко захватывают объекты и передвигаются с ними. Если у робота есть ноги, то для перемещения предметов ему потребуется дополнительная рука — такая конструкция повышает стоимость, она менее эффективна и недостаточно гибкая.

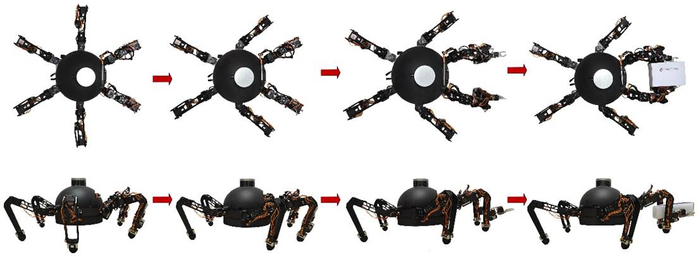
Поэтому авторы новой работы представили конструкцию, основанную на механизме конечностей, который оснащен различными конечными эффекторами для улучшения рабочих характеристик.
Команда отмечает, что манипулирование во время движения — хороший способ повысить эффективность и выиграть время. Нового робота назвали ALLOMAN hexapod, благодаря интеграции ног и рук робот может мобильно манипулировать предметами.
Пока что ALLOMAN hexapod — это экспериментальный прототип. На следующем этапе работы авторы собираются внедрить в него больше функций для манипулирования. Авторы планируют использовать свою разработку в областях, где нужны многофункциональные платформы, например, для обеспечения безопасности города, борьбы с терроризмом и исследования планет.
Читать далее:
За ней охотились столетиями: что нам известно о планете Вулкан рядом с Солнцем
Астрономы нашли планету недалеко от Земли: у нее очень странная орбита
Необъяснимую двойственность нашли в физике элементарных частиц: к чему это приведет