
Метод обучения, предложенный робототехникам, позволяет роботу автономно научиться выполнять плавательные движения.
«В нашем исследовании мы представили биологический метод управления обучением с подкреплением для моделирования движения подводных роботов, — рассказал Ганг Чен, один из авторов разработки. — Этот метод основан на одной из наших предыдущих работ по изучению движения бобров, опубликованной в журнале Springer Link’s Journal of Intelligent & Robotic Systems».

Подводные роботы, подобные созданному Ченом и его коллегами, представляют собой нелинейные системы, и их движения включают сложную гидродинамику. Таким образом, точное моделирование их движения может быть очень сложной задачей, требующей значительных вычислительных ресурсов.
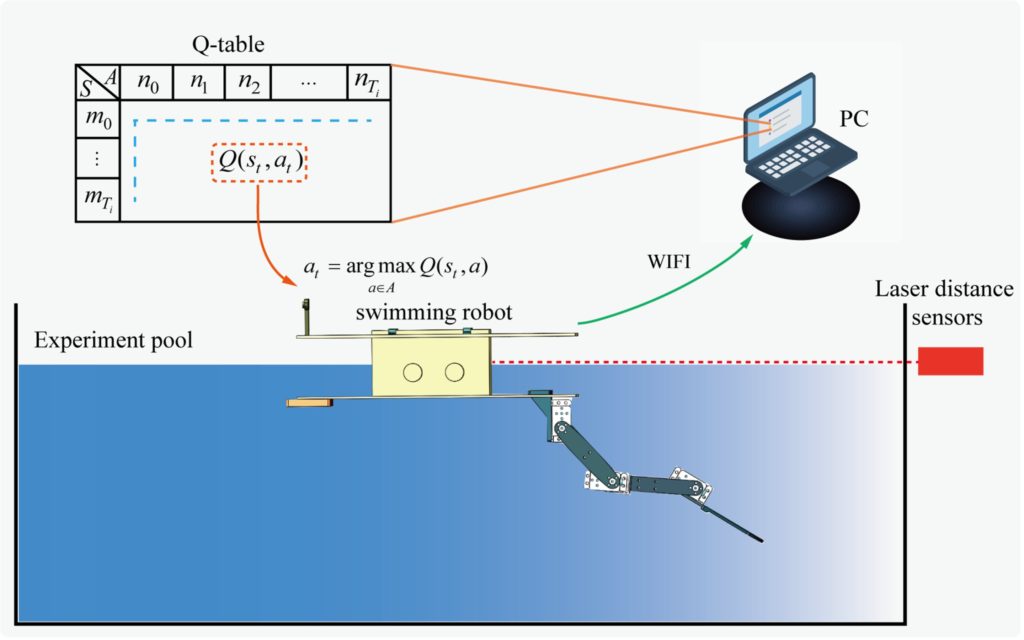
В отличие от других моделей управления подводными роботами подход, разработанный Ченом и его коллегами, не требует интеграции сложных моделей движения, основанных на гидродинамике. Это связано с тем, что он основан на упрощении представлений о работе суставов, отвечающих за плавание, у бобров. Это облегчает обучение модели, а также уменьшают неэффективные движения робота во время обучения.
«Объединяя обучение с подкреплением с механизмами, лежащими в основе плавательного поведения бобров, наш метод максимально быстро и эффективно реализует контроль робота над плаванием, — пояснил Чен. — Наиболее заметным преимуществом является то, что он позволяет избежать создания сложных моделей управления движением и быстро реализовать управление плаванием боброподобного одноногого робота».
Читать далее
Американский спутник «разглядел» с Земли необычное послание
Опубликовано видео с ракеты, которую запустили из экспериментального ускорителя
Чудовище в центре нашей Галактики: посмотрите на фото черной дыры в Млечном Пути