

Четвероногий робот Magnecko автономно переходит между режимами ходьбы по горизонтальной и вертикальной поверхностям.
Осмотр высоких металлических конструкций или машин лично и вблизи затруднителен для людей. И, хотя могут помочь воздушные дроны, ограниченное время автономной работы — большая проблема. Робот Magnecko с магнитными ногами может помочь.
Его разработали восемь студентов бакалавриата технических наук в исследовательском институте ETH Zurich в Швейцарии. На создание четвероногого робота их вдохновили способности геккона карабкаться по стенам и потолку. Этот вид ящериц использует крошечные подушечки лап, а Magnecko — специальные модули с магнитами, разработанные в лаборатории робототехнических систем ETH.
Каждый модуль состоит из нескольких магнитов меньшего размера, которые можно неоднократно намагничивать и размагничивать в течение доли секунды с помощью короткого электрического импульса. Важно отметить, что они не требуют электричества, чтобы оставаться в любом состоянии. Также магниты очень сильны. Так, всего одна «ступня» выдерживает в 2,5 раза больше общего веса робота.

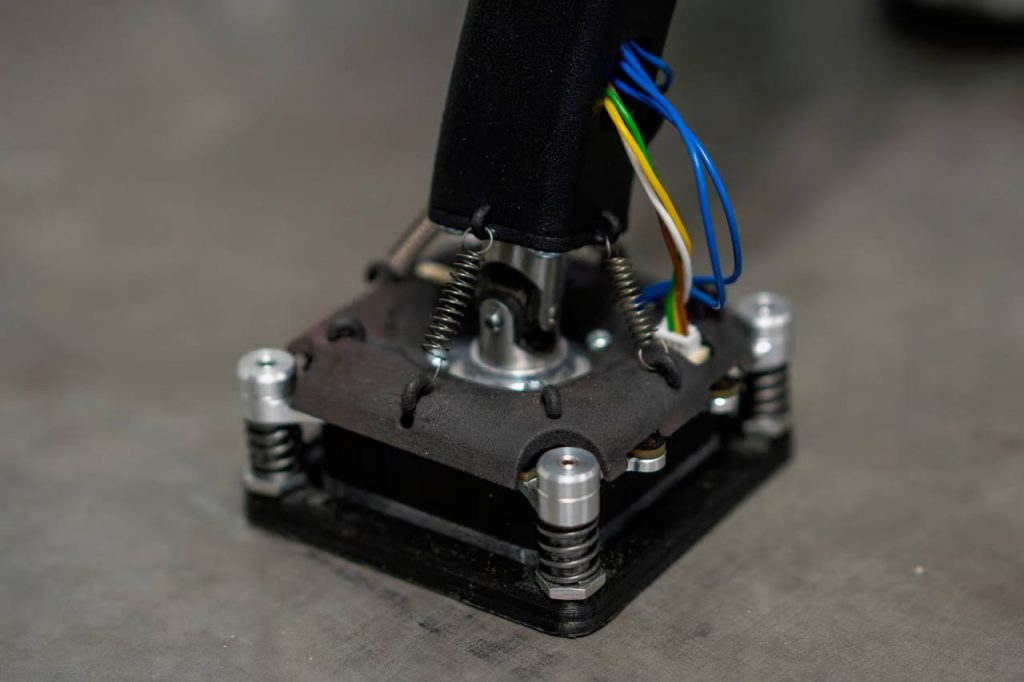
В нынешней комплектации Magnecko надо указывать, куда идти. Это делает оператор с помощью беспроводного портативного контроллера. Тем не менее, робот продолжает следовать по заданному маршруту самостоятельно, автономно переходя от ходьбы по вертикальным и горизонтальным ферромагнитным поверхностям. Подпружиненные резиновые подушечки на «лапах» Magnecko помогают ему сохранять сцепление с поверхностью.
В будущем робот сможет автономно избегать препятствий, планировать маршрут и «не только проверять конструкции», отметили в New Atlas.
Читать далее:
Мощным землетрясениям за несколько часов предшествуют незаметные движения Земли
Астрофизики объяснили формирование сверхмассивных черных дыр в ранней Вселенной
Астроном объяснил изменение формы галактик: Млечный Путь не всегда был спиральным



