Инженеры из Германии и Швейцарии разработали микроробота с акустическим управлением. Устройство улавливает колебания внешнего звукового поля и движется по узким трубкам. Технологию можно адаптировать для доставки лекарств по кровеносным сосудам и проведения неинвазивных операций.

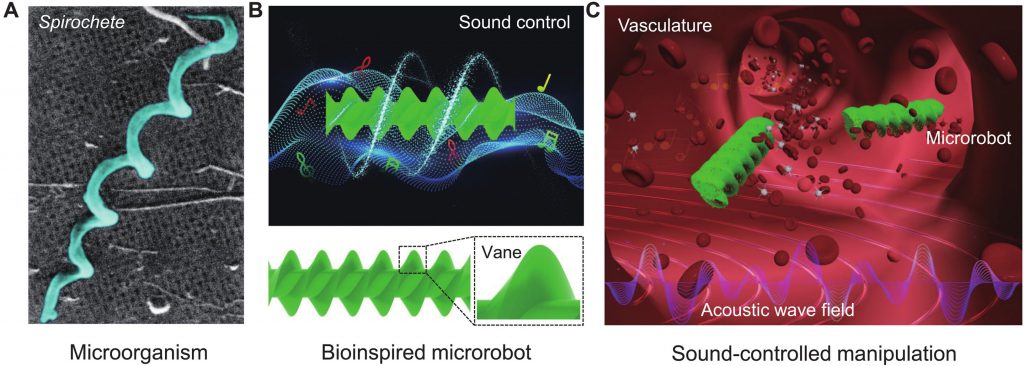
Исследователи позаимствовали идею для управления движениями роботу у спирохетов. Клетки этих микроорганизмов закручены в форме спирали. Вращаясь в вязкой жидкости, бактерии совершают поступательные движения.
Инженеры спроектировали микророботов, которые используют тот же принцип для движения. Ученые напечатали на 3D-принтере кусочек нетоксичного полимера в форме штопора длиной 350 мкм и диаметром 100 мкм. Они поместили устройство в стеклянную трубку, наполненную водой. Под воздействием внешнего акустического поля молекулы жидкости вибрируют, создавая вихрь, который толкает робота вперед.

В серии экспериментов ученые продемонстрировали, что, изменяя свойства звуковых волн, можно управлять скоростью и направлением движений робота. Микроробот реагирует на звуковые стимулы частотой от 12 до 19 кГц. При этом если увеличить частоту звуковых колебаний, робот будет двигаться вверх внутри трубы, наклоненной под углом 45°.
Исследователи из разных стран работают над созданием различных систем для таргетированной доставки лекарств. Распространенное решение — микророботы, управляемые с помощью магнитного поля. Хотя такой подход показал себя многообещающим, у него есть проблемы и ограничения: сложное производство и громоздкое оборудование для управления. Инженеры рассматривают роботов, управляемых с помощью звука, в качестве простого альтернативного решения.
Читать далее:
С самой известной звездой в небе что-то происходит. Рассказываем главное
Посмотрите на неуловимого кальмара у Галапагосских островов: его засняли живым впервые за 18 лет
Крохотный двигатель ICE-Cube Thruster работает на воде и помещается на кончике пальца